[Dan Royer] is hard at work building his own personal robot army. Robots mean motors, and motors mean gearboxes. In [Dan]’s case, gearboxes mean $3000 wasted on a prototype that doesn’t work. Why doesn’t it work? He doesn’t know, and we don’t either.
[Dan] would like to use small but fast DC motors for his robots coupled to a gearbox to step down the speed and increase the torque. The most common way of doing this is with a planetary gear set, but there’s a problem with the design of planetary gears – there is inherent backlash and play between the gears. This makes programming challenging, and the robot imprecise.
A much better way to gear down a small DC motor is a hypocycloid gear. If you’ve ever seen the inside of a Wankel engine, this sort of gearing will look very familiar: a single gear is placed slightly off-axis inside a ring gear. On paper, it works. In reality, not so much.
[Dan] spent $3000 on a prototype hypocycloid gearbox that doesn’t turn without binding or jamming. The gear was made with incredible tolerances and top quality machining, but [Dan] has a very expensive paper weight sitting on his desk right now.
If anyone out there has ever designed or machined a hypocycloid gearbox that works, your input is needed. The brightest minds [Dan] met at the Bring A Hack event at Maker Faire last weekend could only come up with. ‘add more lasers’, but we know there’s a genius machinist out there that knows exactly how to make this work.
 Hackaday Fail is a column which runs every now and again. Help keep the fun rolling by writing about your past failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.
Hackaday Fail is a column which runs every now and again. Help keep the fun rolling by writing about your past failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.














Can’t help with the engineering of the teeth, but I know what I would do. I’d use an eraseable felt pen (such as a whiteboard marker) and draw that on the inner gear, then run it and find where it transfers the ink and binds.
Then if that’s not at the expected place I’d rework the CAD to thin them a little.
Rather like when your dentist puts in a filling, and gets you to grind your teeth together on some sort of carbon paper, so that point can br ground down.
I realize that you are probably looking for help on how to fix the gearbox but really if you are willing to spend 3k on the gearbox alone, a harmonic drive (works on a similar principle) might be a better option especially if you are building a robotic arm. Zero backlash, typically 20-30x more reduction per unit volume compared with planetary gearboxes, easier designs specs for the teeth, equilibrated force distribution, and better backdrivability. The last one is really important for robotic arms. One of the better examples of robots employing these systems is the Kuka LWR.
Here is a link to a catalog listing of one of the drives used on the iCub robot we work with:
http://wiki.icub.org/images/7/74/Harmonic_cat.pdf
I know this is not the kind of “help” you were looking for but I hope it might point you towards some new resources or ideas.
I’d love to see the price list. I’ve been collecting used harmonic drives for projects from ebay. Even 2nd hand they are pricey.
Another fail (this time by HaD): Using an drawing of a planetary gear from Rohloff (famous german bicycle parts manufacturer) to illustrate a hypocycloid gear problem.
+1
+2
Yeah… I would rather see an illustration of this hypocycloid system than the very common and well-understood planetary system. Especially when the subject of the article wasn’t building a planetary gear, but rather the hypocycloid.
They grabbed the first picture in the post, automatically. The next one shows a hypocycloid.
I guess I don’t understand the problem. Simply searching for hypocycloid gearbox on Google brought me all kinds of results, many with working examples, including demo videos.
Are those all the wrong type?
What am I missing?
For example, this metal and delrin model seems ideal for robot use.
http://www.zincland.com/hypocycloid/
I studied zincland before I made my gearbox. I even automated his generator into a javascript with real-time feedback. https://www.marginallyclever.com/other/hypocycloid-generator.html
The cam profile on the js generator is broken. The cam generated and as can be seen on the thingiverse has discontinuities on the cam profiles. The JS should be reviewed as the original by Alex Lait (zincland.com) did not appear to have this issue.
I got interested – the port to javascript is correct. The issue is the ‘offset in pressure angle’ was just set way too high when generating the profile.
The cam needs to be remachined.
An helical planetary gear set would probably avoid such backslash…
That was my first thought as well, untill I thought about how to construct one from steel – not cheap! They could be 3d printed if the part was large enough. Perhaps even cast resin using a silicone mould created from a 3d print?
Hi,
no helical gears also do have backlash, because a helical gears tooth shape is mostly “nothing” else than your normal involute gear.
All gears that are developed by an involute share this, you can however reduce the backslash (sticking the gears so that they really “cam” in contact this has drawbacks and is not recommend for operations with much load)
Gears under load condition will change from single tooth contact to multiple tooth contact, so if you stick these to tight together they would jam.
helical gears:
– slient
– broader line of contact / more load capacity
– need axial bearings
– more expensive
Putting the encoder on the output shaft rather than input shaft would also eliminate backlash issues in the feedback loop.
Dax and Ben nailed it. There are helical planetary gear boxes on the market. You get quiet operation with enormous backdrive torque and very little backlash at the output. The encoder on the encoder shaft can be extremely accurate. This is the solution used by many, many automation companies. It works, and it can be had very cheaply. If the goal is a cheap robot arm, using high-volume parts will keep the cost low. Buehler Motors, Maxon, Johnson Electric, etc. all make motors with planetary gears that are used where precise control is needed. Prototype units cost about $70/ea and in large quantities they can be had for $12. Otherwise, if you need lots of torque and precise control, why not use stepper motors?
Really? I took a quick glance at Maxon and Buehler and motors/gearboxes in the 15Nm range were all well into the three digits price wise, where right now I make do with a geared stepper that’s $72. I’m sure theirs are much nicer, but that’s not the point.
An output shaft encoder helps, but you can still have problems. Primarily, the motor will start chattering at moderate to high gains as it bangs back and forth through the backlash.
That is a software control problem, not a hardware problem as such. If you teach your controller about backlash (why would you not?) then the condition you describe could be avoided. There is no requirement to stick with a classic PID control scheme.
You will be needing very accurate encoders (ones that can ‘read between the lines?), in the end they determine the absolute position accuracy.
This is a very common solution to large scale CNC machines with reduction gearing from the motor to the ballscrew. Often there is even an encoder on both the motor and the output shaft. Jelle nails it on how to solve the ‘chatter’ issue. The biggest issue I see with making a gearbox with such tight tolerances is using it; the machine will become less and less accurate over time with wear, the beauty of the output shaft encoder and some software is you can have a fairly sloppy gearbox and still have reasonable repeat-ability. Most of these large scale CNC machines are designed (or were) for a 25+ year lifespan, they have to deal with a lot of wear. Nothing stays perfect forever, accounting for that is part of a good long term design
How about giving the inner gear a spherical edge (does that make sense?). Or drowning the thing in grease.
If you want zero backlash then use a harmonic gear or strain wave gear.
Harmonic gears have zero backlash, but have other error motions: hysteresis and windup. Of course, these can be corrected with an encoder on the output and a suitable control law.
I was quoted $1650 each for harmonic gears. an order of magnitude more expensive than I can use in this project.
I can’t see why you couldn’t makea simpler version by yourself.
https://www.youtube.com/watch?v=D_neLbcW_BY
Or:
https://www.youtube.com/watch?v=x6XQtNjorLs
I don’t quite understand this one. Does it solve the backlash issue?
The first video does. It’s a harmonic gear. The second one is a planetary-harmonic gear where the “wave generator” has been replaced by a planetary system, which does have some amount of backlash due to tolerances, but it should be greatly diminished.
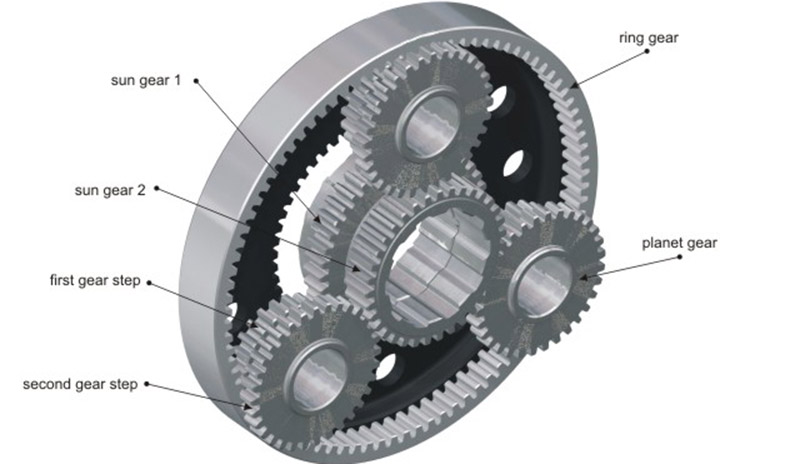
To understand how it works: the planet gears are a stack of two different size gears each, and the bottom planetary system is being driven by the sun gear in the middle. Because the top planet gears are of slightly larger diameter, their outer diameters turn around a larger circumference when the planet system turns around, yet the gears themselves roll along the smaller diameter of the bottom ring gear, so the difference in diameters turns the topmost ring gear slightly in relation. This makes for a very high gear ratio in a single step.
He could just use this https://www.youtube.com/watch?v=MBWkibie_5I
or this :-0 https://www.youtube.com/watch?v=MUH0MGP7AGc
Both were studied before I made the gearbox. I could not “just use this”. their plans weren’t available and they would have required tweaking (and then testing) anyhow.
YUP there’s a reason that robots use servos and harmonic drives
That’s not true. Industrial robots can use either harmonic drives, cycloidal gear heads or direct drive rotary servos. Most Fanuc robot arms use Nabtesco cycloidal drives, not harmonic. Makers of cyclo and harmonic drives both advertise “less than 1 arc minute backlash”.
Actually Robert is correct. Nabtesco has market share in the US on robotic arms in Fanuc, ABB as well as Yaskawa. We provide a superior product for the space needed. Here’s more about us: https://www.nabtescomotioncontrol.com/applications.php
I see the trouble. But for see it, u should have really really good eyes. The trouble is that he makes running two differents gear ratio with same shaft. So astonishment, it does’nt work. He got, at least, again two, solutions for fix it. He can remove one of both gearsets or Just dismantle it n add a part for get the double reduction torque expected. This part will link the satellite gears of the first gearset with the sun gear of the second gearset.
maybe Keith would help if asked
https://www.youtube.com/watch?v=qEGAs8OMuJc
(without looking at the vid) Which one, Fenner or Rucker?
both make slightly boring but mesmerising machining videos on youtube.
Fenner did the gear video
The solution to high gearing ratios with no backlash and high torque is the harmonic drive:
http://en.wikipedia.org/wiki/Harmonic_drive
http://mechanicaldesign.asmedigitalcollection.asme.org/data/Journals/JMDEDB/27946/051004_1_1.jpeg
Stumbled on this, maybe it helps. https://www.youtube.com/watch?v=guvatctnjww
studied it before i designed my gearbox.
Maybe its not the gearbox causing the binding but the quality of motor you attach to it. All motors will have a wobble/wander associated with them at the output shaft. Have you tried a electric motor shaft which passes all the way through the gearbox and is supported both sides. This would reduce any extremes of wobble and wander of the output shaft. Either that or try different motors and observe which binds more often and then measure eccentricity.
I tried a few different motors. The next revision might remove the motor from being direct drive and use a coupler. I can live with input backlash as long as there’s not output backlash.
One other thought is that the planetary gears are not rationally ratioed by the way you CNC them. If you cut them individually you will get three dissimilar gears even with tight tolerancing. Therefore the ratios they have would have are not the same so a turn of X many degrees for one gear results in a turn of X.1156… degress for another gear for example.
IF you cut the planetary gears as one large wide gear and chopped into three slices to make three planetary ones they should all turn by the same ratio as they were constructed from one single source wide gear. Ask the CNC shop if that makes sense.
When making a single wide gear, the cylinder you make is still conical and oval within some limit of tolerance due to clamping forces, tool forces and minute misalignment of the guides, so each gear can be slightly different regardless.
My 2ct: While I like the elegance of a hypocycloid gearset, I think the answer can be found in the pressure angles and sliding forces. Let’s see…
* The eccentric shaft and first (inner) bearing convert the input rotation to a radial displacement of the inner gear, the bearing prevents any direct torque transfer (besides friction).
* Rotating the radial displacement vector converts the input torque into a radial force wedging the inner gear into each cavity of the outer gear. The radial force would be a result of the input torque, eccentricity and bearing friction.
* The contact face geometry of both gears is so that a radial force causes the inner gear to rotate. The force at any contact point of the gearset can be broken up into a radial part and a part perpendicular to that (and thus the vector of torque). The pressure angle determines the ratio between those two force components.
* The friction losses in a gearset contact point are (not exclusively) dependant on normal force to the surface times sliding distance.
* Most designs I’ve been able to find have dreadful friction angles, that alone would probably kill efficiency. This could be negated by having a significantly lower sliding distance per revolution, but I can’t really see that.
Another thought: The closer you get to ‘zero’-backlash tolerances (backlash will actually be deformation/load dependent), the more contacting surfaces you get. All these surfaces have progressively worse pressure angles, increasing friction even more.
Can you simulate the motion of this design in cad?
Yes, if you have a good cad program.
The real fail is the 3grand spent on a prototype.
no.
You don’t know how that figure came to be, 3K will buy you enough CNC time for a few protoypes I think, and from the linked story that is the impression I get: he made more than one prototype. If he had calculated-in his own design time it would have been much more.
but at the other hand, you did not fail at trolling!
it was about 1750 spent on machining + my time + someone to do decent drafting.
His cam lobes have too sharp a profile. They should be more like little hills (rather than mountains).
Unlike an involute tooth style gear, hypo-cycloid gears require cam and rotor tooth profiles to be different.
That’s what bluing is used for. Get a tube of it and you’ll find your issues pretty quickly. In fact, you shouldn’t be building any precision gearboxes without the use of it. That’s how you know it’s right, not because someone measured something and said it was right. Bluing doesn’t lie and it’ll tell you exactly where the issue is. Put it on the gears and start turning (or attempting to turn) over and over and the pattern will emerge and you’ll see the issue. It almost has to be a pitch issue or involute shape issue.
Did you read the .io article?
blueing helps to find tight spots, in other words: find the spots that need some tolerance/play. That is what causes backlash, isn’t it?
Is your prototype made of a hard material? If so, try with a prototype made of a softer material first.
Nothing stops at an exact positions, always is going to be some movement even if you can’t perceive it. In order to eliminate it, the geometry must perfect (really perfect). When you drill, even the hardest drill bit is going to bend and is going to change the perfectly calculated geometry.You have to measure the final pieces after the CNC process having in account the tolerance that you have given to make by hand the final adjustments. Since the pieces seems to be round shaped, the measurement could be difficult. When you use softer materials the deformation that can acquire is bigger than harder materials (like PVC vs Iron). Using softer materials, part of the imperfections can be absorbed; the downside is that you’re going to have a small undesired movement because of the deformation that helped you before.
Remember that some play can be acceptable, the height of a building is measured in meters, not in nanometers.
(Just a tip for measure the building in nanometers, use negative molds.)
Salu2
Spend some money on a 3d printer and get it worked out on a much cheaper scale first?
+1
-1.
Come one, this guy is trying to produce a precision component and is having issues with binding. Chuck the clunky tolerances of a 3D printer in the mix and he has loads more troubleshooting to wade through before the design works without binding.
The prototyping process is supposed to get you closer to a product, not further away.
-1
We are yet to determine he has a tolerance issue, or a theory one.
For that a 3D printer is perfect.
Also 3D printer is may be used, if it is scaled up to eliminate the 3D printer inprecision.
So yes, you need a 0.2mm precision 3D printer for this. But it is not that high of a requirement.
Simple method of using two half cogs biased by a spring to greatly reduce play I’ve always thought was pretty clever. Any time you can bias the output play is almost eliminated within the range of the bias. Maybe there is a solution in that. Two smaller motors, two small cheap conventional gearboxes Where they are not working against a force they work against each other so there is no play, as the output does work against an opposing force the corresponding motor power is reduced. When the system crosses the threshold of the bias force there is no play anyway the opposing motor to catches up though it’s play, minimal lag, and then the two motors act together.
So a delrin, nylon, or other engineering material was not cool for a prototype?….
Here is an idea. Use a gilmer drive pulley for the inner shaft and for the outer shaft use a drum with a gilmer belt fitted and epoxied to the inner surface with the teeth facing inward.
Did you use lots of oil or grease to eliminate friction given the large surface area?
that, and the tolerances. If the inner is a bit bigger than the outer, it won’t turn.
prototype using clear acrylic from a laser cutter
Maybe its just me, but I dont see the ACTUAL nonfunctional gearbox anywhere, just a video of one that works, and concept pictures….
Where are the pictures of the real fail, and the dxf’s of its design?
this, for all we know he might of hallucinated one :)
this whole post is a FAIL, picture of a working bike gearbox, link to a blog that links back here in a loop,and claims of spending money on something without even a picture of said something
not to mention trying to force mechanical solution when simple control logic would suffice (who gives a crap about backlash and play in the motor when you mount encoder on the ARM, not the motor
+1
Too much backlash in a planetary gearbox? There are many companies that make planetary gears with very low backlash, like a few arc seconds. There are also spur gearboxes with little or no backlash like the vexta tapered gear boxes.
There are lots of companies that have made robot arms like he wants without going to extremes for anti backlash and they work fine.
Is sun gear 1 and sun gear 2 locked together? Do they turn independently of each other?
Find an old Snapper Comet 28, remove the right side wheel and cover to expose the differential.( after you remove all the grease) Or look at a parts diagram on the web. Looks similar to a drive system that you are trying to achieve.
Remember KISS.
Need to see:
1) what loads are expected into and out of the gear box
2) the drawings and the materials.
I’d guess it’s all so tight to fight backlash, which this kind of gear box has (and so do all gear boxes unless they are pre-loaded) that a small amount of deflection results in binding of the input shaft either in its bore, which is probably too short, or in the first stage gear where the engagement is probably too long for the deflection.
Notice that most of these use a ball bearing between the first gear and the input shaft, and it’s not a regular ball bearing but one that allows angular misalignment. If it is a bushing or a preloaded ball bearing that does not allow for misalignment, then that will bind.
What did u got everyone ? I said what’s wrong, the gear ratio. If u have Lego, Meccano or any other assembly set with various gears sizes, u could try it at home. Take two shaft, twice two same gears, two with 8 teeth, two other ones with 32 teeth if u try it with Lego. Then take two 3-holes-wide parts, put the shafts in the holes with, on each shaft, the smaller gear in front of the taller gear. Put the second 3-holes-wide part over that. Try to turn it n u’ll see that seems locked. So this is exactly same trouble that he got with his reducer
We are ignoring you because that is not how his reducer works.
obviously, ’cause it does’nt work. See this video n u’ll may understood what i’ve try to explain to everybody
https://youtu.be/p8fAHTeDGiQ
I’ve got a diploma in industrial maintenance, i know what i say.
You are showing an example of a planetary gearset, which is what they showed at the top of the article, but isn’t the gear set that is the problem. His is a hypocycloidal one. https://www.youtube.com/watch?v=xktsFLkfRto
His reducer does not work the way you think. You would need three shafts to simulate it.
His reducer does’nt work at all on the epicycloïdal parts. The experience that i explain show y it’s not turn only on this part of the reducer. Even if this last work, the hypocycloïdal require to let the motor shaft free to move, so he’ll lost an important part of output power with overheating trouble. He should use worm gear for get high torque n increased accuracy. He’ll win on everything, parts, money, weight n many other…
The picture at the top of the article is not the faulty gear.
I believe the design under discussion is actually the orange one on the side panel that serves as an icon for the entry. A reverse image search provided this link – http://www.thingiverse.com/thing:371422
Which appears to be by the right person. Perhaps Brian just forgot to include it. For me, the ring gear pins being turned into spikes seems strange. A more even ratio of material between these and the teeth on the cycloidal disc for me would seem to produce contact surface that’s less stabby (technical term). This however is just my guess, Mech Eng is not my field.
I am a watchmaker, and I remembered an old issue with 3 shafts of gears linked- perhaps
I don’t fully understand his design, but could it be a problem of paradox? There was a guy
called James Ferguson, and he made an orrey to illustrate the problem that became known
as “Ferguson’s Paradox Orrey”. It’s difficult to explain. Here’s another modern version of
something along those lines-
https://www.youtube.com/watch?v=UXUU0R-GSZ8
Maybe it’s not turning because it physically can’t!
If it will turn, just binds a bit, put some lapping compound on the binding surfaces, hook up a strong enough motor and a meter to monitor the power it takes to turn the gearbox then run it until it gets broken in. Take the gearbox apart, clean the lapping compound off everything and measure the parts.
Change the CAD design to match the “wear machined” dimensions.
Dan, you’re reading this? Good.
With normal gears, the teeth push against each other in the direction that force needs to be transferred. There might be a tiny bit of sliding involved as the next tooth slides into place to make contact.
In the case of your hypo-whatever gear, the teeth need to slide along the fixed base. The driving wheel pushes in one direction, and the teeth need to move in another. This strongly depends on the coefficient of friction.
Think of it this way. If you have a crate standing on a flat surface. Push parallel with the surface, and eventually the crate will move. Push perpendicular to the surface (adding weight), the box will never move, however hard you push. In between there is a threshold angle at which the box will start to move given enough force. The angle at which this happens is related to the friction coefficient: the ratio between the “parallel force” and and the force required to make the box move.
Some materials are made to have “grip”. So a normal car-tire has this above 1.0. So assume we have a 1kg box and we’re pushing at a 45 degree angle. Push 1kgf, adds 0.7kgf of downforce and provides only 0.7kgf of forward force. Push 10kgf you’re ALMOST there: 8kgf of downforce (7 from the added pushing, 1 from gravity from the box) and 7kgf of forward force. But you’ll never get there.
Anyway, in your gear design the force is way more perpendicular to the surface and requires a very low friction coefficient for the gear to be able to move. “seizing up” is what happens if the friction coefficient is too high.
And to be honest: I don’t like that gear design. I don’t think it will solve your problem of backlash. There are just as many options for backlash there as with normal gears. Just produce them with enough quality to reduce backlash issues. And because the design REQUIRES sliding, I don’t think it will be durable.
Nailed it.
Are there any pictures of the gearboxes that don’t work?
Are there any pictures or videos of the gearboxes that didn’t work?
The Word of the Day is “nutating”.
Have a look at this. https://www.youtube.com/watch?v=-kllE4YffQM Many variants have been designed and patented over the past several decades.
Now if you could have the parts molded out of high strength nylon or some other engineering plastic suitable for gears…
That is brilliant. A gearbox demonstrating a principal I recognize from the nutating axis of the earth ever 28,000 years.
Every time I think Ive seen it all- I see something I never would have imagined. Brilliant.
More like the motion a coin spun on edge makes as it’s halfway between upright and stopped flat on the table.
3k. As in $3000 dollars. As in build a top of the line workstation. As in purchase a used 4-cylinder.
Okay, My shock as passed. It is obvious that you DONT want to spend another $3000 (‘fricken hell I can even imagine’). [Dan Royer], Well I’m glad you posted.
Just watched the vid posted “p=5268”.
Well, I can’t sugar coat this. That mechanics looks as ugly as a incorrectly set bit on a drill.
I have no words to describe the lack of symmetry. I typically don’t have OCD about internet posts. In a more typical fashion I am annoyed of nonsense. However I can’t help think of the stresses / vibrations / decay introduced into such a design unless this is made of unobtainium it will fail with such ardor and splendor that would make a train derailment look like a ballet. Sorry. Very sorry.
I’m sorry for your loss. There are some really cool extrapolations and suggestions in this thread.
Bottom line is that you will have to redesign. However you might need less parts.
You’ve seen the “Wankel” AKA Mazda RX-7 motion mentioned.
Hell you may even have seen the vid where a off-set 3 pointed drill bit can make a square hole.
[Dan Royer] You need less parts. The parts need to be cheaper. The design requires more tolerance for errors. Take the most “basic” rotating thing. A computer fan. Some are rated to handle different orientations. Aside from the silent sub-culture. Long story short. Gravity f’s everyone up.
The hell with the fancy machnied teflon coated hyper desity plastics that require super finishing etc.
F’ing bicycle gears, Start there. Bike chains, Maybe even a bike chain that is 2 or 3 grooves across. Bike Gear shifters.
FINALLY. I ask you kindly to look at a CVT TRANSMISSIONS!.
!!!
I hope you succeed. And please send me my own C.H.A.P.P.i.E if it works. :)
Maybe you are limited to the existing design you have. In that case. Check out [Matt Keveney] work.
https://www.youtube.com/watch?v=P-Obt-9tZVo
Resync the center and maybe make the teeth more “nugear” like? https://www.youtube.com/watch?v=-kllE4YffQM
“Not like this. Not like this.” *unplugged*
I have seen compound planetaries like this in 8640 John Deere tractors (and other old models with quad range transmissions and two-speed planetaries). On those the inner and outer planets are integral (as yours look). If all three planets are identical (the inner planet and the outer planet have the same “phase” on all three), they need to be timed. A timing mark needs to be made in the same spot on all three, and all marks face directly to the center of the sun gear (assuming the tooth count on the suns allow this to happen). Theoretically, as long as the timing marks are at the same degree CW from a line drawn outward from the center of the sun, it should work.
I assembled one of these compound planetaries with one of the planet’s timing marks one tooth off just for fun, and spun it on the bench. There was a noticeable bind at one point in its revolution that became worse with each revolution. Then it reached its apex and gradually decreased, and it was a cycle. There are undoubtedly mathematical formulae for designing stacked, multiple planetary tooth counts that function without destroying themselves.
Never mind, I misread and thought the failed prototype was a compound planetary.
Drunk surfing, 4:00 am.
I once stmbeled uppon this one:
http://ec-gearing.com/
Any thoughts how it would work out?
And here’s a workind design buildt using cheap(ish) prototyping tools (CNC and casting):
http://lcamtuf.coredump.cx/cycloid/
cough* DYSON cough* That man should never be allowed to touch a vacuum. No one ever said he was smart or a fast learner. Nah I reckon you have another $200,000 to waste on bad prototypes before you reach his level of incompetence ;) The really important part of any project is the font of the name brand. You don’t want any cursive (opening a neighborhood in back to the future?), or serifs muddying up your logo. Use sky blue to infer forward thinking and yellow for the wheels so that they get dirty the first day and folks have to spend $100 on clean yellow wheels. Folks will do it. You really think that people want to use a vacuum on a dirty floor???
I am impressed as hell at the collective brilliance in this thread. Just sayin.
Lots of folks tell me “Man, I wish I had thought of yellow wheels!”
But hey, we can’t all be founders of Amwayzon, the Amazon.com of Amway. This helps you eliminate the middle man and jump most of the Level 4 Catatonics that fill most of the Pyramid plan. Your customers literally order their toilet paper and perfume/dye free soaps online and receive them in the mail after paying postage. It will have you saying “Goodbye Amway and Amazon- HELLO AMWAYZON!!!”
Promo Code TPANUS for a free roll of toilet paper with any order of only $400.00 or more!
A cycloidal drive is really just a variation of a planetary drive except that there is only one planet gear (typically just a bit smaller than the ring gear, and the sun gear is replaced with an eccentric drive. The hypocycloidal drive is a “clever” two-stage cycloidal drive that employs retrograde motion to arrive at a very large reduction that should (on paper) result in a very large torque increase. This is because the output speed is equal to the second stage speed minus the first stage speed. You can arrive at startlingly large reductions with 2-stage planetary drives due to the larger number of teeth involved (example (# SPR teeth/stage): Stage 1: (29,19,67), Stage 2: (26,17,60), final speed reduction: 4128:1). Unfortunately, due to the retrograde nature of the drive, you’re “giving back” most of that torque, so that the most that can be realized is the torque increase of the weakest stage (1.52:1 in the example). All of which brings me to the my favorite quote and IMHO, #1 cause of entrepreneurial failures: “The human capacity for self-deception being what it is…” –Unnamed NASA Engineer on the root cause of the Challenger disaster. Incidentally, this is also know as a differential drive (not the same as in your car, unless you drive a Prius). As just noted, a two-input, single stage planetary gear is used by the Toyota Prius and makes use of this retrograde motion to effect a continuously variable transmission.
I was going to suggest methods of learning from wear in, but g code and Galane explained this well already, when they talked about bluing and lapping compound.
I will add to there ideas with this:
Since during the beginning of you wear in process your gear box will jam, try adding a solenoid that gives the housing a good enough knock to get it going again. I would quickly set up a micro controller that senses the box has stopped, kills power to the gearbox motor knocks the case with the solenoid a few times and powers on again.
Hopeful that helps speed up the wear in processes.
Also there seems to be many who think $3000 is a large amount to spend on this.
I disagree, I think its peanuts your doing well with it, and I wouldn’t blink an eye if I herd that you spent 10 grand before you had something hopeful, and another 20 before you had something marketable ( on just the gear box alone )
People that don’t do R and D With the aim to make products simply don’t know how expensive it is.
I would know I used to be on of them :)
The thing you need to happily do thousands of times to have a success… is to fail.
So Keep up the great work!