Hackaday writer [Joshua Vasquez] wrote about the mechanical difference between the Core-XY and H-Bot movements commonly used in 3D printers on his personal website. There are so many things a beginning mechanical designer can overlook when setting out to make a movement. Sometimes,in the case of these movements, they aren’t readily apparent, and like finding a troublesome pattern in code; have to be shown before the mind picks them up in future designs.
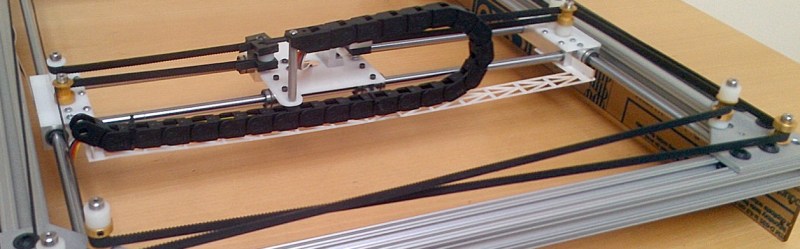
[Joshua] starts by describing how each movement works. At first glance, the H-Bot movement seems simpler and more effective than the Core-XY. The Core-XY uses more belting, and some of the pulleys are out of plane with each other. However, this is done to eliminate a moment put on the frame in the H-Bot design. This moment can throw off the accuracy of the movement in unpredictable ways.
The Core-XY movement is one of our favorites. It keeps the motors stationary. It’s compact, precise, repeatable, and linear. It’s good to understand the mechanical reasons for this. Just like learning the SQL database calls a library has been obfuscating for you lets you write better code.













Joshua Vasquez, please change your website font :P
actually
Please… those of us still using Powerbooks have difficulty reading anything of that…type.
What wrong with poke-your-eye-out San Serif.
Whoa–looks awful on mobile devices! Should be fixed now. Apologies for making everyone’s eyes bleed….
Comic sans is nice :P , good read-up btw :)
Comparing Code to mechanical design doesn’t really work, it’s a completely different set of skills, and in this case makes the reader wonder what is going on or if they’re missing some point. (what does SQL have to do with CoreXY?)
You’re right, It’s not the best example I could have used. I’ve been thinking of ways to reach across the gap between coders and mechanical designers. Since I’m not going to win an award for my code anytime soon… Maybe making up code analogies isn’t’ the best way to do this, haha. Also, can I say that your comments on mechanical design are always on point! Really enjoy reading them.
For what it’s worth, I am a DBA who loves 3D printing, and I really appreciated the analogy ;-).
After (closely) working with mechanical designers for a few years now. I do see a lot of similarities. Lots of it is done on guts feeling and personal preference.
Biggest difference in mechanical design is that you make damn sure that things are proper before you release anything. Updates are very expensive.
C’mon. Be more constructive :-)
Since our creative selves (mine at least) feeds on analogies (whether bad or good: the body also reaches out for fast-food at times), the more interesting question would be:
what is the mechanical equivalent of SQL injection?
— t
bump keys are pretty analogous to sql injection
Two questions:
1. Why not use a GT2 timing belt instead?
2. What kind of accuracy and repeatability can be expected from such a setup?
1. It is using a GT2 timing belt. It’s just one out of many configurations that hold the motors stationary, and has some advantages over other styles.
2. I’d have to think a bit longer about this. My initial thought is that there is a slightly higher, but not meaningful error in this set-up vs. a dedicated belt and motor for each direction set-up. So the same accuracy and repeatability as any other timing belt set-up.
Looking at the parts list it seems that it’s using an MXL belt and pulley – https://docs.google.com/spreadsheet/ccc?key=0AodaAsGd6n41dEpTSzhwM2RzOVJrZlFucEJzNkxRLWc#gid=0 which is not the same as GT2.
Answering my Q1 is this PDF which I uncovered: http://us.misumi-ec.com/pdf/fa/PDFViewer.html?catalog=metric2010&page=1095
Oh, sorry, you are correct. He was using MXL. My guess is that GT2 timing belts hadn’t proliferated 100% through the 3d printer scene yet when this article was written. As seen in this 2013 discussion on the ultimaker forums. https://ultimaker.com/en/community/3313-changing-from-mxl-to-gt2-belts-and-other-xy-goodness
@Abhishek, you’re definitely right; they are indeed MXL, although GT2 is definitely the better timing belt to use in this application, as it’s got about ten times less backlash. (Wish I knew that a few years ago….) I was actually going to post about that a bit later; stay tuned!
It’s just as accurate, given proper engineering. The biggest things you need to engineer for is belt interference and paths. If the belt path is not orthogonal then you get cosine errors. There is a good post here explaining some of that: http://forums.reprap.org/read.php?14,355226
Basically if the belt path connecting to the carriage does not follow a straight line then the belt movement is multiplied by the cosine of the angle (a 1mm movement is no longer 1mm).
This is a common mistake in MANY repraps, where the belt path from the idler pulley through the carriage to the opposing pulley are not straight. the error is small in most cases, but grows large the closer it comes to the edge.
The coreXY acts the same as the movement mechanism you mention, it just has a longer loop and is rotated 45 degrees. The longer belt path can induce some resonance and errors that can occur with poor quality pulleys or improper bearing preload. Again these issues can occur on any other type of movement.
“Just like learning the SQL database calls a library has been obfuscating for you lets you write better code.”
But obviously it does not help you write better English.
Got to give credit where it’s due. Gerrit – you’re picking excellent subjects and writing good articles. It’s almost like the old Hackaday again!
Uhm , no , just regurgitating whats already been elsewhere on the webs for a long time.
All the old HaD articles were too though. But I’m lazy and would rather someone else trawled the internet and provided the interesting things to me. The current swathe of clickbait articles don’t fall under that category.
I have been wondering about this: what is the reason galvanic mirrors and a variable focusing element are not used in laser cutters?
more challenges in controlling, building accurately and part cost probably. Especially decent variable focus elements aren’t exactly cheap. It might still come, but so far using moving gantry systems with fixed mirrors is just much easier to implement on a diy level
I have been thinking it might be because theres many usecases where one wants to have the beam orthogonal/”vertical” on the surface? so as not to get slanted edges?
Hi,
Thank you for the article! I have tried both and I must say Core XY is just slightly harder to assemble correctly! However, hasn’t Stratasys been granted the patent for H-Bot ? The patent filed seems to be for a gantry system showing H-Bot (I believe its the system used on their Mojo printer). I did not see a mention of the H-bot name in the patent; however, the diagrams and the description clearly show and describe H-bot. Anybody knows anything about it? Thank you