Let’s talk about tilt sensors for a second. The simplest tilt sensors – the dead simplest – are a few ball bearings rolling around in a small metal can. When the can is tilted, the balls roll into a pair of electrical contacts, completing the circuit. How about a drop of mercury in a glass ampule with a few contacts? Same thing. You can get more expensive tilt sensors, including a few that are basically MEMS gyros, but they’re all pretty much the same. For [Aron]’s project for the Hackaday Prize, he’s come up with a tilt sensor that is so clever, so innovative, and so elegant, we’re gobsmacked by his creativity.
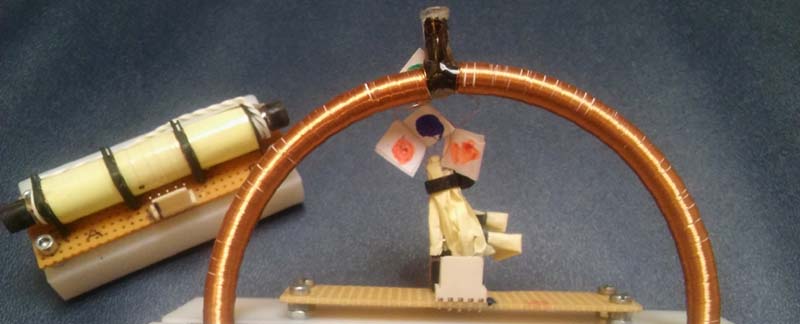
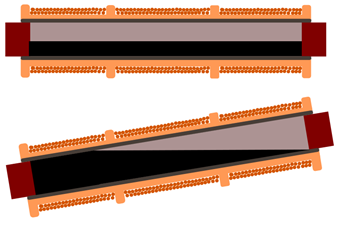 Instead of electrical contacts or gyroscopes, [Aron] is using induction to measure the tilt of a sensor. By wrapping a tube with one long primary winding of copper wire, and several secondary windings in various places, [Aron] built a Linear Variable Differential Transformer. If you insert an iron rod inside this transformer, different voltages will be induced in the primary. Simple, and this device is effectively a position sensor for any ferrous material.
Instead of electrical contacts or gyroscopes, [Aron] is using induction to measure the tilt of a sensor. By wrapping a tube with one long primary winding of copper wire, and several secondary windings in various places, [Aron] built a Linear Variable Differential Transformer. If you insert an iron rod inside this transformer, different voltages will be induced in the primary. Simple, and this device is effectively a position sensor for any ferrous material.
Now for the real trick: put ferrofluid in the core of that transformer. Liquids always find their level, and different tilts will induce different voltages in the primary. Brilliant.
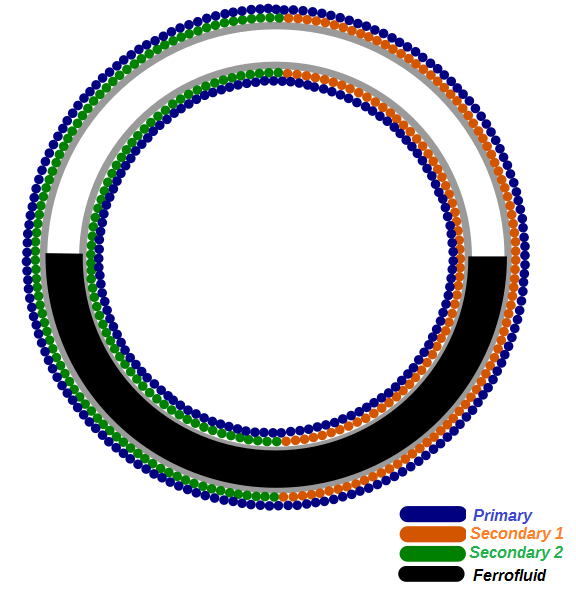 A linear transformer only gets you a tilt sensor, but not one that will measure 360 degrees. If a tube works well, a torus would work better, leading [Aron] to his next great invention.
A linear transformer only gets you a tilt sensor, but not one that will measure 360 degrees. If a tube works well, a torus would work better, leading [Aron] to his next great invention.
This toroidal linear variable differential transformer, when filled with ferrofluid, can measure three hundred and sixty degrees of tilt to an accuracy of one ten-thousandth (0.0001) of a degree. That’s shockingly good resolution for any tilt sensor, and it can do it through a full rotation.
We’re always amazed by the project on Hackaday.io, and especially the project entered in this year’s Hackaday Prize. What [Aron] has done here is so clever, and so elegant, we’re shocked we haven’t seen this before. Finally – a use for ferrofluid besides playing with magnets.
You can check out the video demo of [Aron]’s torridal tilt sensor below.


















And how many pins does one need to read this device?
You could always create an ASIC that processes all the information and provides information using a single wire. Both sensors use 3 coils (6 wires) out of which 1 (2 wires) is power which can also power said ASIC (and i only chose the ASIC idea as an effort to minimize space, PCBs are always an option).
Since the signal is a difference between two AC signals, a differential amplifier made out of a single op-amp will turn it into a DC voltage that can be read with the built-in ADC of a microcontroller.
Point being that the differential amplifier does A-B. Suppose A=-1 and B=-2 so the difference is +1. Same thing if the signs are changed: 1 – 2 = 1 again. The differential amp simultaneously calculates the difference and rectifies the waveform to a positive value. WIth a dual op-amp IC you can then add a simple peak detector to hold the value for the ADC.
The component count would be a handful of resistors, a diode, capacitor, and two pins on the micro. One for the ADC, and another for draining the capacitor in the peak detector to reset it. One pin if you can change the function of the ADC pin temporarily to sink current.
Er, bit of a brainfart. Of course the sign would fluctuate between +- the difference value. No big deal – the peak detector catches the positive values only anyways.
Wow. I spent a good bit of effort trying to do an art project with ferrofluid and it never once occurred to me to do something useful with it.
I have the same problem… also spent a lot of money for the try… it is not the cheapest liquid out there :-/
Doesn’t ferrofluid separate over time?
According to Ferrotec, quality ferrofluid lasts a long time. It’s difficult and expensive to make, and is quite different in quality from the cheap stuff bought in eBay.
(The difference between grinding the magnetite in a ball mill for 6 weeks, versus making a suspension chemically.)
For clarity, which method corresponds to which quality?
The original method to make ferrofluid is to put oil and magnetite (Fe3O4, IIRC) in a ball mill and run it for 6 weeks or so. This gives you extremely small particles suspended in oil, and this mixture lasts a long time.
It was also very expensive, and saw limited use. You could make an air-tight rotating seal using ferrofluids, for example. It was also used in some high-tech speakers.
You can go online and google “home made ferrofluid” and see people just mixing up magnetic ink with oil. The quality and consistency is low, and it tends to separate out. The ink has stuff that you don’t need (binders), and the particle size is much bigger.
Also, IIRC, there’s a chemical method where the Fe3O4 is precipitated, and I *believe* the particle size was determined by temperature of the reaction. People throwing together chemicals in a room-temperature environment would get ferrofluid, but with larger particles.
If you ever visit Manchester, NH, go check out Ferrotec some time. They’ve got a bunch of display cases in their front lobby that are pretty interesting. Real ferrofluid is silky smooth and flows well, and doesn’t look anything like this homemade one:
http://www.instructables.com/files/orig/FP9/1H9P/XW0EP27XLXI/FP91H9PXW0EP27XLXI.jpg
Aww. That home-made attempt just looks sad.
I guess the real stuff is worth paying for.
Great explanation PWalsh!
I think this project is an strong contender to win the 2016 prize. Furthermore, I strongly suspect that this could be sold as a product, and Aron could build a company around selling it.
To put the sensitivity in context, a back-of-the-envelope calculation shows that the gravitational attraction of the moon will cause a deviation of about +/- 2 on the 1/10,000 degree scale, and this is easily measurable.
(Perhaps he could use this to detect magnetic fields as well.)
From what I can see, he’s not even averaging measurements to reduce noise. He might be able to get even more precise than 1/10,000 degree.
This is truly innovative. I’m looking forward to seeing how this develops.
I haven’t really looked into this, but….
On first reading my assumption is that accuracy and resolution are confused and that it is the resolution that’s 1/10000th of a degree. This confusion happens a lot.
So.. When I put his device back in the same position (which will take some serious engineering to do accurately to 1/10000th of a degree) will it reliably give the same reading? Will it measure the difference if I put a lead ball to the left or to the right of it?
OK. Now I did look into it. His “proof” picture shows an error of about 0.5 mV. Many points are about half a mV away from the line. That corresponds to 625 counts of 1/10000th of a degree.
It is a neat demo, but not any more accurate than existing technology. He claims to have about an arcsecond of accuracy (1″ = 0.00028 degrees) which you can achieve easily achieve using an optical encoder. For example, using a low cost 4096 count encoder and a 12 bit interpolator will give an order of magnitude higher resolution than this device, and settle much more quickly, for about $100 depending on your linearity/repeatability requirements (neither of which were characterized with this device, I suspect even the cheapest of encoders will outperform this method on both fronts).
Very clever, indeed, but why when was tilted more then 90 degrees to the right, the dial indicator show less then 90 (seen in the video)?
That’s because the sensor you’ve seen in the video is actually a previous version of the Toroid FCDT, and that version couldn’t measure in an interval of +-/ 180 degrees. On that that version, the two ends of the bended glass tube were next to each other, and when the sensor reached a tilt greater than 90 degrees, the fluid would just flow out of it.
But now, the two ends of the Toroid FCDT are in each other, making an endless loop.
Thanks!
Wouldn’t this work just as well with a number of ball bearings inside the tube? They are probably cheaper to purchase and also reduce the risk of having the ferrofluid deteriorate over time?
But, but, but, ferrofluid!
I bet he tried that also, I would have.
Now he has to make a spherical clear one the size of a bowling ball.
.
Serious question; does ferrofluid oil have a shelf life or just separate? I would think that putting it near a big transformer would mix it back up.
Ferrofluid won’t separate over a long time, the Brownian motion won’t let the nanoparticles to settle.
Ferrofuid is used in many application, if you don’t let it dry out or leave it in a strong permanent magnetic field for a long time, you won’t have any poblem.
Maybe just with some iron dust.
I’m amazed! Awesome project!
Very cool, but I disagree with the “accuracy of one ten-thousandth (0.0001) of a degree” part. While liquid will ‘find a level’, the measurement will be affected by things like droplets getting left behind on the walls of the tube, surface tension distorting the liquid surface around any imperfections in the tube wall, uneven distribution of ferrous particles in the fluid, changes in temperature etc.
Agree; I didn’t see your comment before posting mine far below. I would expect this measurement to have some serious hysteresis where readings at the same position depend on the last rotation direction, and quite possibly on time as well (relaxation effects of all sorts).
Just read the site. Water-based medical grade shelf life 3-4 months. Super expensive oil-based stuff sealed up in loudspeakers ? No idea.
I didn’t know there are medical uses for this stuff! Injection into body and fry cancer cells!
I think this is a bioheat type useage. Also you can use it to block up the blood vessels to the tumour without using surgery by applying a magnetic field, then releasing the field to allow it to flow. In a speaker you never have to worry about separation (just like in a washing machine or dryer) because it is a dynamic environment that continuously mixes the MR-fluid.
In the case of the speaker the mixing is generated both by the agitation of the speaker, and the convective flow as the heat reduces the magnetic susceptibility of the iron particles touching the speaker (makes them less magnetic as they reach higher temperature), and the cooler more magnetic particles displace the hotter particles as the speaker’s magnetic field pulls them in.
How is this better than an accelerometer, apart from maybe some damping against vibration?
Nothing.
But when was the last time anyone did anything with ferrofluid other than make YouTube videos with it?
Maybe it’s more resistant to gamma radiation.
I’m just glad someone did something new with what amounts to basically an artsy liquid toy.
Run this backwards and spin the ferrofluid around at high velocity. Use it as a gyro :D
Yes! Also run slower with stops to induce a form of locomotion. Wonder what PWM waveforms would do..
I had an idea a bit ago to run this inside a bike wheel to generate (a little) electricity, but got as far as viscosity and eddy currents before scrapping the idea (I’m an uneducated EE mech newbie). Didn’t even get a chance to get ferrofluid gunk all over my hands.
You might have trouble trying to generate power in the wheel, it won’t move unless you stop. It’s velocity is relative.
Chuck in some neodymium balls. Spin it with some electricity and it will store it provided you can keep the friction of the fluid low. Maybe that metamaterial spray that stops things getting dirty or wet.
Could be good as a viscous clutch motor combination.
Clever idea!k I would like to do something involving Potassium and Sodium fluid in a semicircle tube with tiny electrodes in it. Haven’t worked out the logistics yet. It was only a brain flash. Another brain flash was this: A LASER tilt meter. I know somebody already BTDT but I post it here anyway:
http://oi64.tinypic.com/nyxkjl.jpg
Just thought each RX could be small trimmer potentiometers.And LASER could be replaced with LED mounted closer to the solar cells. Whole thing can be contained in a small enclosure to keep out extraneous light pollution..
Another: Light source can be on a pendulum of sorts and the solar cell array can remain stationary. That way enclosure can be way smaller.
I think Rx resistors can all be same value. No need for escalating values as the overall resistance is lower and higher\er on either side. So the meter will show a progressive voltage as the light source illuminates each photocell.
Having moving parts will not be very reliable.
But you can place a laser right under the pendulum pivoting point and place a mirror on the pendulum (at the pivoting point). The laser light will illuminate the sensor placed at the double value angle of the vertical deviation. Use a concave mirror to narrow the return angle of the laser.
Interesting! I’d have to see a diagram of your modification to fully understand it though.
Sorry guys, but that circuit will not work. Solar cells and resistors like that will generate the same voltage/current regardless of which cell is illuminated by the laser pointer.
@k-ww – I was wondering about that. Not sure the photocell will allow any forward current flow through it when dark. I was thinking that a CdS cell would be better as it does allow flow when dark (but very little). Maybe the CdS cell would not require any resisters as it is it’s own photo-responsive-resister.
0.0001degree from experimental validation? You’ll have to document the testing procedure extremely well for that to be believable. The hysteresis of the constant wetting/dewetting process alone should be MUCH greater than that for any kind of liquid.
I also found the 0.0001 degree claim doubtful. To put this in context, 0.0001 deg corresponds to lifting the end of a 1 m stick 1.7 um (microns). That is so small that the linear y=x approximation of y=sin(x) is off by less than 1 part in 10^12. I would have used an exclamation mark but did not want it confused with factorial. Given the problems with vibration, hysteresis, magnetite settling, and slow response time its pretty clear why this is not used in practice. Don’t get me wrong, I like it when people experiment with new things, but I found the gushing enthusiasm for this a bit over the top.
My inner grammar nazi is bothering me– its should be it’s.
To be fair, the small angle approximation works up to about 10 degrees or so.
Fascinating but highly impractical. As far as vibration dampening goes using a viscous liquid it’s probably not the best choice what with standing waves and all. A typical application for a tilt sensor would be in a piece of heavy machinery …the grand majority of heavy machinery have diesel engines/lots of vibration.
This is a really neat project. Though before anyone runs out and tries to patent this, note that the ‘electrolytic tilt sensor’ has been commercially available for a long time. “But!,” you’ll scream, “this is magnetic coupling and that’s variable capacitance!”. Yep, they tried the magnetic version already – but it was a more expensive system to manufacture.
It would be interesting to see how much hysteresis there would be, based on whether the ferro-fluid wets the surface of the container. (all about the meniscus shape – water in glass tube vs mercury in the same tube) Fascinating!! It would be fun to play with and could be a valuable addition for GOTO telescopes. If a scope had an affordable, high precision measure of gravitational down, gps and magnetic north it could completely align itself with a need for only the most subtle adjustments.
Pretty cool. I built similar devices when I studied in Italy-
http://www2.diees.unict.it/users/bando/files/ferrofluids.pdf
I did this in 1996 using only glycol while living in FL in the mid 90s. It was posted on my old webpage at euronet.nl after I changed jobs and moved to Holland. The internet archive still has a copy. Please excuse the raw formatting from when they archived my webpage. I made a video on Sony 8mm camcorder — which I still have yet to transfer to digital — of a pendulum project using this inclinometer. I have to transfer this info one day to my current website.
http://web.archive.org/web/20040603095049/http://www.euronet.nl/users/ragman/robot1.html
I was wondering if there was a really “simple” tilt meter that I could buy the parts at Radio Shack and Home Depot. I came up with this. I call it KISS Inclinometer: http://oi67.tinypic.com/ot1dtg.jpg
Interesting stuff, but questionable claims.
360-degrees x 10,000 = 3,600,000
… roughly 22 bits resolution….tricky but do-able.
Put in perspective, that’s like weighing a garbage truck, to the accuracy of a single penny.
Inspiring project. Thanks.
My boss Nobelprize winner in precision measurements Ted Hansch says never measure anything, but frequency. If you could have two oscillators and when tilting one would go up in frequency and the second oscillator decrease frequency.