
[MakinStuff] wrote in to let us know about a project he did for new and improved interfacing to the ubiquitous cheap Chinese digital calipers. Interfacing to this common caliper model is well-trod ground, but his project puts everything about interfacing and reading the data in one place along with some improvements: a 3D printed connector that makes mating to the pads much more stable and reliable, 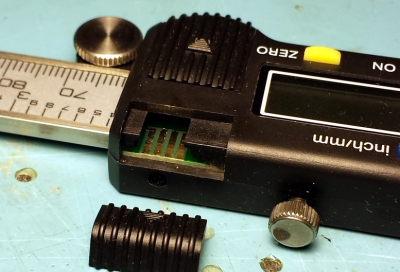 a simple interface circuit for translating the logic levels, and an interrupt-driven sample Arduino sketch to read the data. Making the sketch interrupt-driven means the Arduino never sits and waits for input from the calipers, making it easier have the Arduino do other meaningful work at the same time, ultimately making it easier to incorporate into other projects.
a simple interface circuit for translating the logic levels, and an interrupt-driven sample Arduino sketch to read the data. Making the sketch interrupt-driven means the Arduino never sits and waits for input from the calipers, making it easier have the Arduino do other meaningful work at the same time, ultimately making it easier to incorporate into other projects.
The connector has spaces to insert bare wires to use as contacts for the exposed pads inside the calipers. Add a little hot glue and heat shrink, and you’ll never have to fiddle with a hacked-together connection again.
This common caliper model has been hacked and re-purposed in interesting ways. We’ve seen them used as a Digital Read Out (DRO) on a lathe as well as being given the ability to wirelessly log their data over Bluetooth.














Would it be possible to add some bluetooth LTE on it ? Siping power from the coin battery and firing up only on a button press. Then you can have a connection to your computer and enter your data directly into a CAD software or whatever you want.
Nice idea, but the button cell in a digital caliper isn’t capable of delivering the current required to drive a radio. On the other hand, a small BLE ‘backpack’ would be eminently plausible – much along the lines of the referred bluetooth classic project, but capable of using a CR2032 rather than 2xAA – and backpowering the caliper from it.
I was thinking of an ESP8266, with small lipo, and its own button to power, and wakeup the calliper, take a reading and send that off to the web end point of your choice. I may take a crack at that soon.
I’ve built a couple of Bluetooth interfaces for mitutoyo that use 3.7v lipos for power. The box Velcro’s to the back of the caliper and uses a standard mitutoyo cable with button to transfer a reading to a receiver that I built that is based on a arduino pro micro that uses HID profile to insert the reading into excel.
Wireless, even btle , is going to use a whole bunch of power when actually doing anything useful. It would more likely make the caliper less useful because of the increased battery draw.
Id probably use a tiny usb mcu in a machine assembly size, and try to make a little usb jack you could plug in that hole that does all the duino stuff and follows the same idea. (very similar to micro sd readers or mouse dongles, just terminating in a usb jack and cdc class device for easy integration to pc side software)
These calipers already eat button cells for lunch. I can’t leave the battery in mine if it’s being stored… it will be depleted within 3 weeks. Somebody needs to fix that issue!
Mitutoyo has solved it, their stuff just costs more than the Harbor Freight special.
Harbor Freight’s latest 6″ caliper adds readout in fractional inch (to the nearest 1/128th) and has longer battery life, despite having auto display power-on. Unlike the previous model, the new three mode one does not respond to mode or zero buttons when the display is off.
Unbelievable isn’t it? The “off” switch merely disconnects the LCD so the battery still drains. I did look at hacking mine to put in a switch, but it was too hard! I just remove the battery each time I put it away.
You know, people keep saying that, but my el-cheapo chinese calipers, I don’t remember the last time I changed the cells, a year, probably more. I wonder if it’s just people whot buy crappy button cells and are surprised they don’t last long.
Nope, that’s just yours. All the cheap Chinese ones I know about are battery-killers.
That’s some shitty soldering
That’s some shitty commenting
Great thing to know, the existence of that port was completly new to me.
But the Code is not compilable (the variable triggerPin is used once but not defined, so not a big deal),
And a Picture of the Pinouts would have been nice.
Additional Information on that topic can be found here: http://www.robotroom.com/Caliper-Digital-Data-Port.html
That’s an excellent page, thanks for that!
When you print the plug, print a hole in each end of the groove. Then you can push the wire up through the one end, lay it in the groove, then poke the other end down a bit into the end hole (or pre-form the lead and shove it in!). Secures the lead mechanically, and lessens the chance of the cut end of the wire gouging the PCB.
If someone wants to make that modification and print up 8 or so of them with 100% infill, I could make a mold to cast them in resin. Printed on a resin printer would be best, no little gaps and porosity that FDM parts tend to have.
I’ve used the spring contacts out of a PCI motherboard socket before for making plugs like this (http://imajeenyus.com/electronics/20140109_digimatic_interface/index.shtml). Bit of a fiddle to use, but at least it gives a sprung connection.
On another note, can someone please reply to this comment so I can see if email notifications are working correctly in WordPress again ;-)
I’m gonna reply just because your URL is the best.
Heheh, thanks ;-) And it looks like notifications are working again!
That blog has the best name
Anyone thought about hooking up one of these calipers to a 3d printer and using dc motors?
The motors drive the axes (cheap, strong). The calipers read the axis position, and feed back to the motor controller. There are some cheap calipers with 200mm or 250mm range.
So, now you get cheap, powerful motors, and a 0.01mm resolution…
The resolution may be high, but accuracy and repeatability I suspect are not the best.
If you are going to do that, just buy digital readout scales. You can get up to 1000mm for about $50US.
Yuri put together a great kit to add DRO to old lathes and milling machines.
http://www.yuriystoys.com/
He makes some good stuff. I’d venture you could adapt his head to what you are trying to do if you really wanted.
It isn’t quite as easy as you suggest however. Take a look at servo motor controls. You need to think about motor ramp up, ramp down, and several other characteristics. Locking a DC motor in a single location isn’t as easy as it sounds either. In the end, doing the job with real servo motors with embedded encoders would give you a better solution.
You can take it one step further…
The calipers can also be the linear slides. ;)
Don’t take this the wrong way, but assuming the steppers aren’t overloaded, they are already there (Standard belt and pully configurations with GT2 belts are about that same 10 microns level.) In fact, I’d trust them more than the cheap calipers. (Even with the drawbacks of microstepping.)
Might be useful for a rough system of Oh crap, there’s an error, but the calipers seem to be a bit off +/- 0.02 maybe more at times, which is worse than a 3D printer will do. Heh, just opened and closed mine (recent fractional HF special) shows -0.02 (and it was zeroed. Repeated a few times and it’s been off 0, 0.01, 0.02 and 0.03mm ) Not bad, but not great compared to a sufficiently powerful stepper system.
James_lan,
The encoders inside the cheap calipers/scales are generally spot-on. The repeatability issues come from the loose/crud3e frames. Attached to a more rigid fame a cheap caliper can hold tolerances very well. I used to have a set of iGaging scales on my mill some years ago and tested the crap out of them. When used “loose”, they were pretty horrible (+/-0.003″ repeatability). When mounted on the mill they were spot on (down to 0.0004″), and due to their nature they have no back-lash.
Regards
Yuriy
Andrew,
I know of a company that uses my DRO board as a feedback system for a large CNC router (with 5 mictron glass scales). Refresh rate is about 20Hz, which gives you latency of about 70-ish milliseconds (taking into account transfer, etc). With good PID control this is very workable. Calipers have refresh rate of 3Hz (mostly), which is pretty bad. iGaging scales can reliably refresh at 20 Hz.
Regards
Yuriy
He only did a 3 wire connection. The 4th wire is +1.5V to externally power the caliper. Combined with a source impedance (on the order of a few hundred ohms) you can dispense with the battery altogether.
Oh and what a shitty soldering job; lack of springiness on wires means this will be unreliable.
looks like a shaved down phone plug to me http://image.pinout.net/pinout_rj11_files/rj11connectorC.jpg
Interesting, I wonder if the spacing is compatible
I have tried retro fitting an RJ11 cable for this purpose. The rj11’s pitch is far too narrow.
I suppose you could just solder a more common connector to those pins and avoid all the hassle of spending a lot of money on buying a 3D printer and filament :)
I’d not use the leftovers leg bits from resistors/capacitors, I don’t think those lend themselves well for contacts like that.
Plus those end bits always have glue/residue on them from the paper holding them, so it’s annoying to first have to clean them.
I’d like to see a secondary display addon that snaps on. Right handed calipers, digital, dial or vernier, are backwards for use on a lathe. Measure the diameter and the numbers are facing the headstock. Measure a bore and the numbers are facing downward. To read it you either have to awkwardly reach over the work or have to move around the the back of the lathe – which means you have to have enough room to have the lathe far enough from a wall to walk behind it.
i have the same caliper, been using it for years, yet only now noticed the little cover hiding the data port, cool.
I’m waiting for a single chip bluetooth chip that is reprogrammable toenumerate as a HID Keyboard and can read serial data/parse it, so I can finally improve on that bluetooth project by creating a set of calipers that will ‘type’ in their value into any CAD program you have open on your PC
The USB interface for iGaging’s ‘absolute’ digital calipers and micrometers does exactly that; type the measurement into your CAD program. Which is why the like $80 or whatever they want for it is totally laughable. I’m sure any one of us could make the same interface in a weekend with an Arduino if we bothered. ;D
lol, “reverse-engineer the damn connector for the calipers” has been on my to-do list basically forever, especially with the DRO projects people have been coming up with. I was planning on making one that’d take pins from some manner of card edge connector, so it’d be a proper sprung contact. Damn my procrastination… :\
There’s this:
Precision Digital Caliper Data Capture Android, iOS, Windows Phone, more. Bluetooth enable a Precision Digital Caliper with RS232 port, such as the Fowler Sylvac Model S 235 and Mitutoyo Absolute.
https://serialio.com/SerialMagic/use/BTCaliperS235.php
Kind of expensive.
Just buy a cheap (<$10) BT/UART adapter on ebaY and put it in a dongle box with a small battery.
Awesome! I was looking to make a device kit for newer Chinese calipers and have an adapter designed up already. This’ll give me a jumping off point for code and interface. Thanks for the post.