[Aldric Négrier] wrote in to let us know that his DriveMyPhone project has been open sourced. The project is a part telepresence, part remote-controlled vehicle, part robotic rover concept on which he says “I spent more time […] than I should have.” He has shared not just the CAD files, but every detail including tips on assembly. He admits that maybe a robotic chassis for a smartphone might not seem like a particularly new idea today, but it was “an idea with more potential” back in 2010 when he first started.
The chassis is made to cradle a smartphone. Fire up your favorite videoconferencing software and you have a way to see where you’re going as well as hear (and speak to) your surroundings. Bluetooth communications between the phone and the chassis provides wireless control. That being said, this unit is clearly designed to be able to deal with far more challenging terrain than the average office environment, and has been designed to not only be attractive, but to be as accessible and open to repurposing and modification as possible.
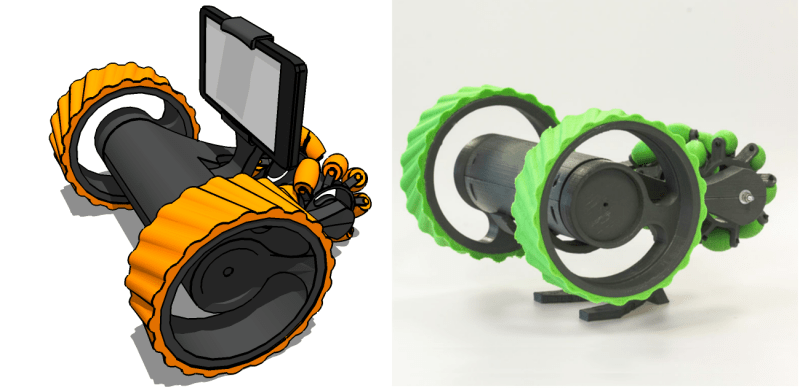
We love the obvious care and attention that has gone into these colorful, cleanly designed, and almost entirely 3D printed devices. The single-spoke wheels are particularly clean and stylish. The files on Thingiverse even include a smartly designed one piece stand.

What was it like to design something like this over several years? “It was tough,” says [Aldric Négrier]. “I was caught in the infinite abyss that is the passion for design [but] I don’t regret the time spent there, I have learned a lot of Computer Assisted Design during this process and this has helped me on other projects. For me, the DriveMyPhone is a piece of art.”
To cap things off, [Aldric Négrier] also shared some of the work he did for future additions and upgrades to the chassis including self-balancing with an inertial sensor, tank treads, a rotating mop attachment for cleaning duties, and even a pair of counter-rotating propellers for an airborne assembly called FlyMyPhone which he admits was “probably not a good idea.”
The idea of using a smartphone (which is capable of data over the mobile network) is attractive because your wireless range is not limited to what you can squeeze out of something local like WiFi. We have also seen vehicles outfitted with a WiFi to 3G bridge for that same purpose.














can it run away when i’m about to press the snooze button ?
Oh … the design is pretty good. For function and esthetics alike
Although I’m not really keen on the single spoke wheel.
It’s a cool design,but I really don’t get the use of mecanum wheels here. Mecanum wheels only really have any advantage when being driven; As a castor, you’re better off with standard omniwheels.
The core idea is really nice. Adafruit have some nice Bluetooth boards with motor driver add ons and there is the MKR1000. The design looks nice although I agree with others some of the choices seem to be looks over function and may not be an ideal solution.