[Ben Katz] is building a running robot from hobby level brushless motors, all on his blog under the tag, “HobbyKing Cheetah.”
One of the features of fancy modern industrial motor and controller sets is the ability for the motor to act as a mass-spring-damper. For example, let’s say you want a robot to hold an egg. You could have it move to the closed position, but tell the controller you only want to use so much force to do it. It will hold the egg as if there was a spring at its joint.
Another way you could use this is in the application of a robot leg. You tell the controller what kind of spring and shock absorber (damper) combination it is and it will behave as if those parts have been added to the mechanism. This is important if you want a mechanical leg to behave like a biological leg.
[Ben] had worked on a more formal project which used some very expensive geared motors to build a little running robot. It looks absolutely ridiculous, as you can see in the following video, but it gives an idea of where he’s going with this line of research. He wanted to see if he could replace all those giant geared motors with the cheap and ubiquitous high performance brushless DC motors for sale now. Especially given his experience with them.
So far he’s done a very impressive amount of work. He’s built a control board. He’s characterized different motors for the application. He’s written a lot of cool software; he can even change the stiffness and damping settings on the fly. He has a single leg that can jump. It’s cool. He’s taking a hiatus from the project, but he’ll be right back at it soon. We’re excited for the updates!














OH MY GOD.
That looks so cool.
Great job!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
But it does look like its neck is broken.
Poor little thing.
Does it eat alot?
Great job. cant stop watching the video.
Yeah! That head :P
Great project! Great head banger!
Needs a YouTube-style metal remix. :)
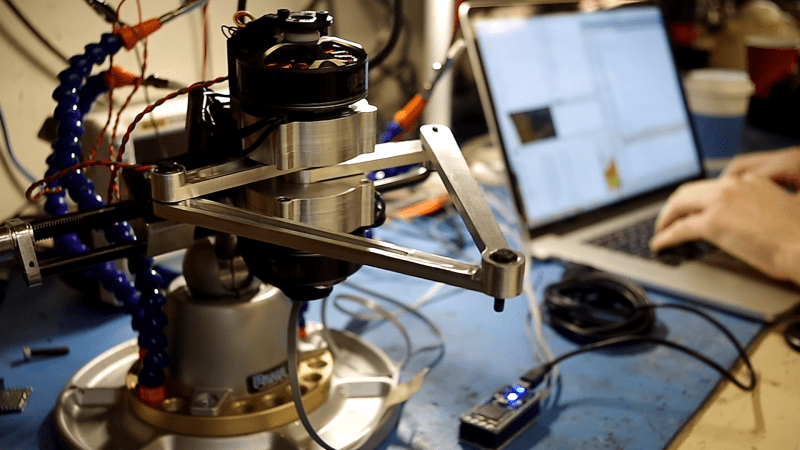
Most of all i like clamp where the leg is fixed (on photo).
Can anyone recommend where i can buy one?
It’s a PanaVise brand, and they’re available everywhere.
The vise is a panavise, but he has the helping hand thing on it you can buy from ada fruit. It’s just Loc-Line brand tubing with gator-clips added and a nice aluminum fixture that the Loc-Line can screw into that mounts to the vise, as in the picture. They sell a stand alone helping hand version too. I have some larger Loc-Line tubing as part of a vacuum system on my drill press and band saw. The stuff is crazy expensive though. You could probably make your own version with a 3D printer though…
Oh I didn’t even notice the Loc Line.
Or just use a regular alligator clip on some thick (<12 for iron) gauge wire. Should last a while until fatigue breaks the wire. If you're really invested regular annealing will prolong the life.
I’m jealous – University and doing cool stuff don’t seem to be mutually exclusive like they are elsewhere. Looks like some great work being done, go Ben!
Depends on the school somewhat, but unfortunately, a lot of young engineers to be spend all their free time at school partying and never bothering to get into any kind of practical knowledge style labs or research products. University is not curated for you like high school – where you have adults pushing you in the right direction all the time. They expect YOU to be the adult and choose your own path. A bit more like real life…
You can take certain courses and end up with a piece of paper, which might get you a job, but is really just a piece of paper… Or, you can choose to take some labs and school/work experiences that will earn you that piece of paper AND you may graduate with some actual practical skills that will serve you well when you get out and get a job.
Lol that head is so funny way less terrifying than boston dynamics new mini-spot make robots cute again.
https://www.youtube.com/watch?v=tf7IEVTDjng
I saw a video yesterday for that thing. I want one, but it looks terrifying! Why did they design the head/gripper to look like a snake skull?
I’m impressed that it can run up stairs and do the dishes. :D
Hello there hackaday, thanks for the writeup! For clarification, I was not personally involved with the Super mini cheetah robot shown in the video. That’s Will Bosworth’s work. I’ve seen that robot in person, and am designing towards a similar size scale.
Hello Ben Katz, i found a documentation for you, about nucleo motor drive and i have had some questions to ask if you are down to answer let me know please