There’s a theory that the fear of scurrying things is genetic. Likewise, a similar theory arose about the tendency for humans to find helpless things cute. After all, our useless babies do best in a pest free environment. This all could explain why we found this robotic roach to be both a little cute and a little creepy.
The university sponsored project, JumpRoaCH, is a collaboration between South Korea’s SNU Biorobotics Lab and Berkeley’s Biomimetic Millisystems Lab. Imitating insects has been a popular avenue for robotic research, and often results in very interesting experiments.
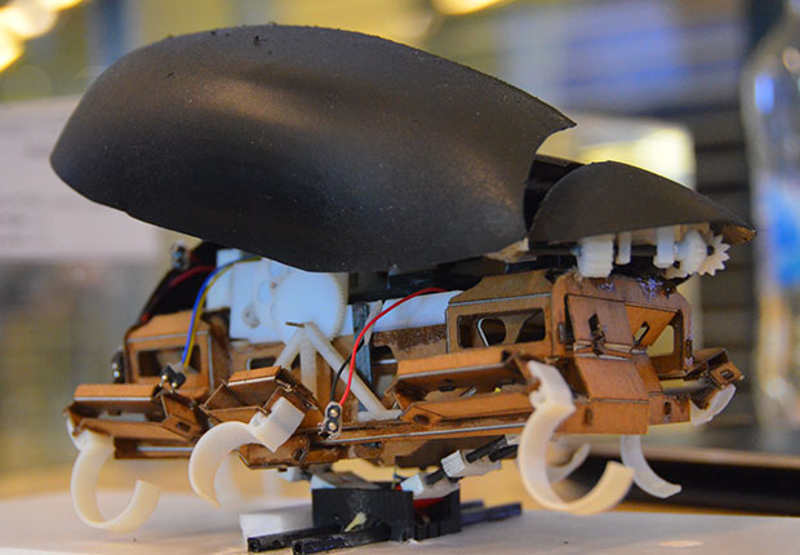
This robot looks like a ladybug going through its rebellious teen phase. It runs on six hook shaped legs which allow it to traverse a wider array of surfaces than wheels would, at the expense of speed and higher vibrations. The robot does a very convincing, if wobbly, scurry across the surface of its test table.
It also has a secret attack in the form of a single Rockem Sockem Robot arm located on its belly. With a powerful burst, the arm can launch the robot up a few feet to a higher surface. If the robot lands on its wheels the researchers high-five. If the robot lands on its back, it can use its ,”wings,” to flip itself right-side-up again.
The resulting paper (PDF file) has a nice description of the robot and its clever jumping mechanism. At least if these start multiplying like roaches, hackers will never short for tiny motors for their projects. Video after the break.
Featured Photo Evan Ackerman/IEEE Spectrum














I like it, nice high jump but surely it’ll never land on its feet as the arm will still be extended. also timimg :)
Even a quarter lands on its edge every now and then! I feel sorry for those researchers working in a high-fiveless office. I wish I hadn’t mentioned it. haha
Their next trick should be to speed up the shell casing used for the self-righting and make them more into a sort of aero-aids to try and steer in while flying through the air!
Not wings, elytron.
The plural form would be “elytra”.
Yep… had the plural and singular reversed… thanks for the correction!
That thing is 100% cute! ^_^
On a perhaps less happy note, that thing is 100% perfect for espionage…I’m sure the TLAs would be OK with losing the jump mechanism and use the freed space to fit maybe a mic, a camera, a wireless network adapter or an SDR. It could not only be mistaken for a roach from a distance (with some brown paint and antennae) but could hide like one too.
Some small mishap:
“It runs on six hook shaped legs which allow it to traverse a wider array of surfaces than wheels would”
“If the robot lands on its wheels the researchers high-five”
Either way, pretty cool little robot, i like how they looked at how beetles etc ‘self-right’ and used that, although the wings do add a bit too the creepy factor.
Haha that music though. Usually scientific papers have some classical music; I wasn’t expecting a Ghost Fight remix, lol.
All through my PhD, I never heard of a scientific paper having music. Even in this case, I haven’t been able to find any. Any hints?
Would opening the wings (elytra) during the jump help it land on it’s feet/bottom more times than just jumping closed up?
Still a bit of debugging to do but looks like it might take off.
Great article research once again; BD used the jumping arm in a rover more than ten years ago.