[Matt] likes to make videos (and he’s pretty good at it judging by the quality of his videos). But video isn’t much without audio. Handheld recorders with small built-in microphones have a fairly high noise floor so [Matt] has a Rode NT1-A — a pricey but very quiet microphone. However, for field work, it isn’t handy since it requires a power supply and preamp to go along with it.
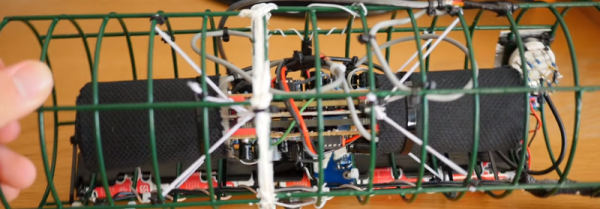
 Another problem is that for stereo recording you need two and because they are quiet, they tend to pick up handling noise so you probably need to mount them on tripods. That’s all too much to carry around, especially on a hike. So [Matt] cannibalized two microphones. He repackaged them in a shock mount (made from a bird feeder and elastic), and added a battery pack and a custom preamp. The shock mount eliminates the handling noise and the custom PC boards mean you don’t have to carry a lot of extra gear.
Another problem is that for stereo recording you need two and because they are quiet, they tend to pick up handling noise so you probably need to mount them on tripods. That’s all too much to carry around, especially on a hike. So [Matt] cannibalized two microphones. He repackaged them in a shock mount (made from a bird feeder and elastic), and added a battery pack and a custom preamp. The shock mount eliminates the handling noise and the custom PC boards mean you don’t have to carry a lot of extra gear.
The end result (see the video below) looks like someone made a purse out of a tribble, but it does sound good. If you hang on through most of the video (of fast forward to about 7:25), you can hear the microphones picking up thunderstorms, the ocean, the wind, and even [Matt’s] heartbeat.