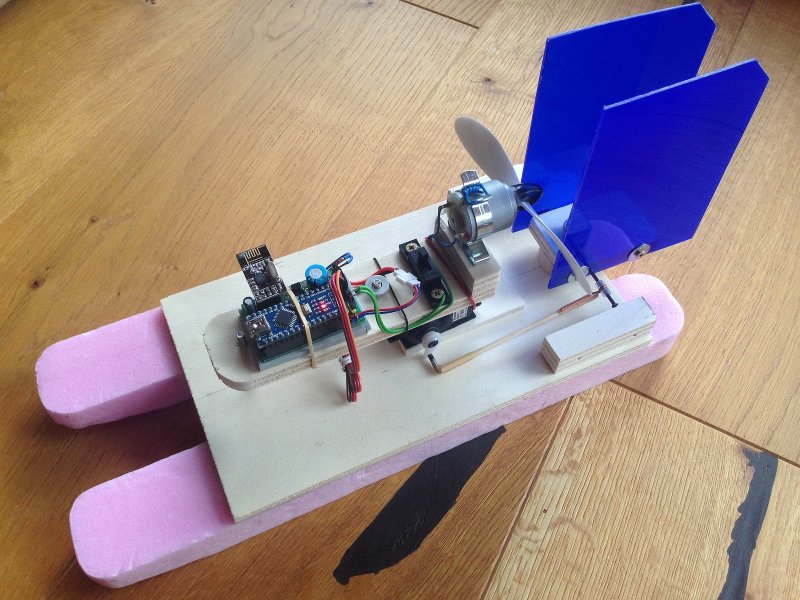
[Markus Gritsch] and his son had a fun Sunday putting together a little toy airboat from a kit. They fired it up and it occurred to [Markus] that it was pretty lame. It went forward and sometimes sideward when a stray current influenced its trajectory, but it had no will of its own.
The boat was extracted from water before it could wander off and find itself lost forever. [Markus] did a mental inventory of his hacker bench and decided this was a quickly rectified design shortcoming. He applied a cheap knock-off arduino, equally cheap nRF24L01+ chip of dubious parentage, and their equivalent hobby servo to the problem.
Some quick coding later, assisted by prior work from other RC enthusiasts, the little boat was significantly upgraded. Now the boat could be brought back to shore using any R/C controller that supported the, “Bayang,” protocol. He wouldn’t have to face the future in which he’d have to explain to his son that the boat, like treacherous helium balloons, was just gone. Video after the break.














That is beautiful in it’s simplicity.
Okay, I’m obviously missing a piece here. Last time I tried doing RC as a hobby (i.e., build, crash, build, crash…), you had to buy a radio, which meant a multi-channel transmitter and receiver. These came as matched sets, although you could buy transmitters and receivers separately as long as you knew what band and what channel they were.
Now granted, that was 20 years ago, but what has changed? Do they not have RC-specific bands and channels any more? What are these “Bayang Protocol” transmitters? I ask all of this because once electric propulsion became available, the radio became the last expensive component. If that’s changed, maybe I need to get back into build/crash mode again.
As far as I understand there’s no need for a specific crystal oscillator for the radio anymore. It’s more like you pair it to your R/C and they shake hands; then it’s basically like any paired connection (bluetooth, zigbee, etc.). They run on certain bands and just broadcast wherever, the R/C scoops the specific bits it needs to not crash out of the aether.
A lot of RC things these days use general purpose 2.4GHz 802.11 wifi, or related protocols rather than the older analogue or PPM type systems. And many of the cheap quadcopters, planes, cars etc use the same protocol over that connection. So you can use the same transmitter with several models.
Hence a transmitter from a £30 quadcopter will pair with the receiver and then allow you to control the servos in anything you can pair with and then decode the Bayang (or other well documented) protocol and generate the required PCM outputs.
search for ‘devo 7e’ and you’ll find hacks and mods.
here’s mine:
https://c2.staticflickr.com/2/1652/25369361152_1db1bf3716_z.jpg
nrf module and also one for another protocol that many quads use. you just add a few modules and the rest is software programmed.
Oh, and where the heck are the batteries?
“old phone battery underneath the connection board”.
I would most recommend some weatherproofing on those electronics.
Well considering the hacked crap nature of the boat I’ed recommend an old pop bottle and some hot glue.
instead of moving the “rudder” on the back of the boat, to control airflow direction, wouldn’t it be easier to just rotate the motor? Although I have to admit, a “rudder” looks much cooler.
The prop becomes a gyroscope so if you rotate it in an extremely light boat the base of the boat will turn. But the thrust will still be in the original direction. With a flat bottomed boat this will just mean you drift in the original direction. In a real boat you’d probably get used to over steering and playing with the throttle to minimize the effect. To maximize your turning radius you would need a keel or the boat will need a deep draft to get the most out of turning the fan. Both of the those options are usually not desired in air boats since they are supposed to skim over the water and debris.
Where did you get the original boat kit?
There is a modified receiver code now, with extended features. From “Floureon H101” remote (Bayang protocol) now is possible to control 1 analog motor speed, 3 servos and 4 digital outputs, switched from 4 buttons on remote. Details and code in comments.
hi did you have a the code?
Hello, Jorge. There is original Author’s code, and modifications by me:
http://dangerousprototypes.com/forum/viewtopic.php?f=56&t=8509