Here at Hackaday, we definitely love to celebrate the hard hacks: the insane feats of reverse engineering, the physics-defying flights of fancy, or the abuse of cutting edge technology. But today I’d like to raise a rhetorical glass in tribute of the simple hacks. Because, to be perfectly honest, the vast majority of my hacks are simple hacks, and it’s probably the same for you too. And these often go unsung because, well, they’re simple. But that doesn’t mean that something simple can’t be helpful.
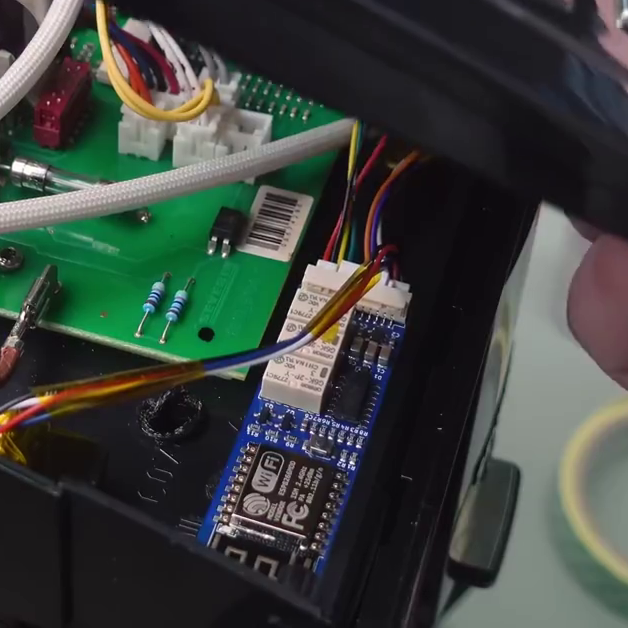 Case in point: an ESP8266 press-buttons device that we featured this week. It doesn’t do much. It’s main feature is that it connects to a home automation network over WiFi and enables you to flip three relays. Wires coming off the board are to be soldered to the not-yet-smart device in question, simply connected to each side of the button you’d like to press. In the example, a coffee machine was turned on and the “go” button pressed, automating one of the most essential kitchen rituals. While recording the podcast, I realized that I’ve built essentially this device and have it controlling our house’s heating furnace.
Case in point: an ESP8266 press-buttons device that we featured this week. It doesn’t do much. It’s main feature is that it connects to a home automation network over WiFi and enables you to flip three relays. Wires coming off the board are to be soldered to the not-yet-smart device in question, simply connected to each side of the button you’d like to press. In the example, a coffee machine was turned on and the “go” button pressed, automating one of the most essential kitchen rituals. While recording the podcast, I realized that I’ve built essentially this device and have it controlling our house’s heating furnace.
For the experienced hacker, there’s not much here. It’s a simple board design, the software heavily leverages ESPHome, so there’s not much work on that front either. But imagine that you lacked any of the wide-ranging skills that it takes to make such a device: PCB layout, ESP8266 software wrangling, or the nuances of designing with relays. You could just as easily build this device wrong as right. The startup costs are non-trivial.
Making a simple design like this available to the public isn’t a technical flex, and it’s not contributing to the cutting edge. But it just might be giving someone their first taste of DIY home automation, and a sweet taste of success. There’s not much easier than finding a switch and soldering on two wires, but if that’s the spark that pushes them on their path to greater hacks, that’s awesome. And even if it doesn’t, at least it’s another appliance under user control, connected to a private WiFi network rather than spying you out and phoning home to Big Toaster.
So here’s to the simple hacks!