The trademark hacker style of Hessian YouTuber [Homo Faciens] is doing a lot with a little. Given a package of parts from a sponsor, he could have made something “normal” like a fancy robot arm. Instead, he decided to make a winchbot. (Video embedded below.)
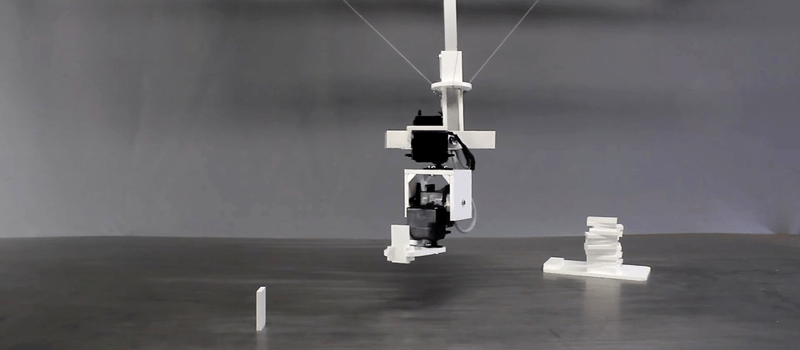
What’s a winchbot? It’s a big frame that supports three relatively heavy motors that pull steerable gripping arms around. It’s a little bit like the hanging Hektor / wallbot / plotterbot and a little bit like a delta-style 3D printer. Although [Homo Faciens]’s build doesn’t showcase it, a winchbot is also a great way to lift heavy things because the parts that need to be beefy — the frame and the lifting motors — don’t have to move. We love the gimballed square rod that works in concert with the winches!
With five extra servos on hand, and the computing power of a Raspberry Pi, [Homo Faciens] couldn’t just stop with lifting a claw. Instead, the gripping-arms part of the bot is mounted with four degrees of freedom and is powered with software that makes it stay parallel with the table and rotate around the gripper to make programming easier. Watch it in action in the video to see what we mean.
The biggest unsolved problem that we can see is the jerkiness that it displays in moving things around. That doesn’t stop it from building up a tower and a domino knock-down. We suspect that there’s some combination of firmware and hardware tweaking that can solve this problem, or it could just be run slowly so that the wobbles damp themselves out. We’re also quite confident that [Homo Faciens] will come up with an elegant and cheap solution. Have you seen his CNC machine?
Thanks [Carsten] for the tip!














Why do you not get commercial winches using Delta like this?
It seems tome there could be a lot of advantages with few drawbacks.
Why is the centre rod necessary?
Without the centre rod the effector end would not be held rigid. Without it when you moved the gripper it would change the centre of mass and make controlling it much harder.
As long as all three “strings” are under tension and the centre of mass of the end is below and inside the support point triangle then it cannot move.
Should have said “the head support point triangle”, less confusing.
Yes, you make a good point. So the further apart the “strings” are spaced at the head the more stable it would be.
I think this project still uses the centre rod to add rigidity as at this weight scale any change in the centre of gravity would result in a loss of accuracy.
Mount the servo arm on nothing but three strings and you get a pendulum. The rod keeps the robot arm in a well defined angle relative to the work area.
What? Three strings make a tripod and it is inherently stable and fixed.
It’s fixed in one point only (where the cables meet), but you have to mount a robot arm on that point and that’s where the pendulum starts.
Closer inspection shows me that indeed you have the triangle too small. You need a bigger plate with your three ropes attached as far apart as possible and the need for the whole rod assembly is removed.
Simply do what I did while thinking about this bot:
Mount three cords on the vertices of a triangular plate and somewhere else (I used the tripod of my camera). See how easy you can move it around.
the center rod appears to be the cause of the jerkiness – the uneven tension as from the wires seem to be causing the bearings to bind as the rod moves up and down.
Well, the main issue is, that one step of a winch equals a change in cable length of 0.5 to 1.5 mm and that’s too rough for a jerk free movement. Using bipolar steppers in microstepping mode would make it much better. Of curse having a fourth winch on to of the frame as demonstrated in the video could build a more constant load on all cables which would help, too.
what an adorable little robot. great job working out all the specifics. would love to see an improved version with stepper motors to reduce the jitter!
Yup that jitter is a bit troublesome, I’ve never seen a robot with Parkinson’s disease before.
Let’s see, if my sponsor gives me parts that could help to cure the Parkinson’s desease ;-)
Thanks Elliot for promoting my WinchBot. The documentation is on my pages:
http://homofaciens.de/technics-machines-winchbot_en.htm