When thinking of humanity’s ability to harness wind energy, many people will conjure images of windmills from places like The Netherlands or Persia. But people have been using wind energy for far longer than that in the form of sailing ships. Using the wind for transportation goes back another four thousand years or so, but despite our vast experience navigating the seas with wind alone there is still some room for improvement. Many modern sailboats use a number of different pulleys to manage all of the rigging, but this new, open-source pulley can replace many of them.
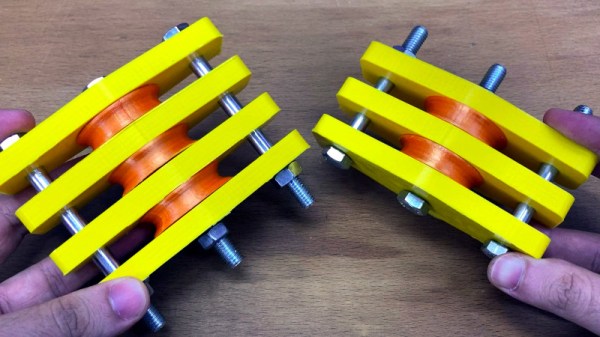
The pulley, or “block” as they are sometimes called, is built with a polymer roller made out of a type of nylon, which has the benefit of being extremely durable and self-lubricating but is a bit expensive. Durability and lack of squeakiness is important in sailing applications, though. The body is made from CNC-machined aluminum and is composed of two parts, which pivot around the pulley’s axis to allow various ropes (or “lines”) to be inserted without freeing one end of the rope. In testing, this design outperformed some proprietary stainless steel pulleys of similar size.
Another perk of this design is that it can be set up to work in many different applications on a sailboat, whether that’s for hoisting a mainsail or pulling in a jib or any other task a pulley could be used for. It can also be stacked with others in many different configurations to build custom pulleys of almost any type, and can support up to 14 mm lines. For a sailor this could be extremely valuable, because as it stands each pulley on a ship tends to be used in only certain applications, and might also be proprietary from a specific company. This pulley is being released into the open-source world, allowing anyone to create them who wants one.
Thanks to [Keith] for the tip!