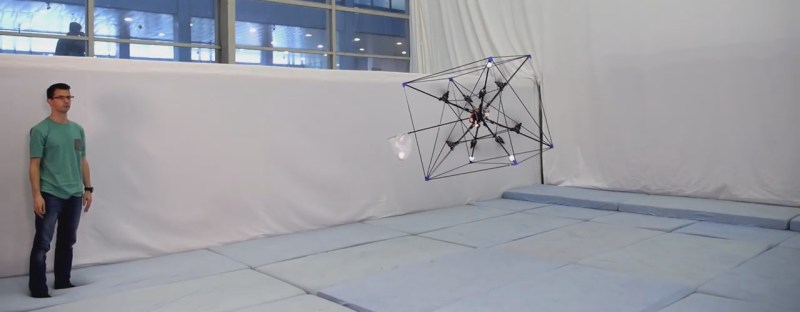
Wouldn’t it be nice if you had a flying machine that could maneuver in any direction while rotating around any axis while maintaining both thrust and torque? Attach a robot arm and the machine could position itself anywhere and move objects around as needed. [Dario Brescianini] and [Raffaello D’Andrea] of the Institute for Dynamic Systems and Control at ETH Zurich, have come up with their Omnicopter that does just that using eight rotors in configurations that give it six degrees of freedom. Oh, and it plays fetch, as shown in the first video below.
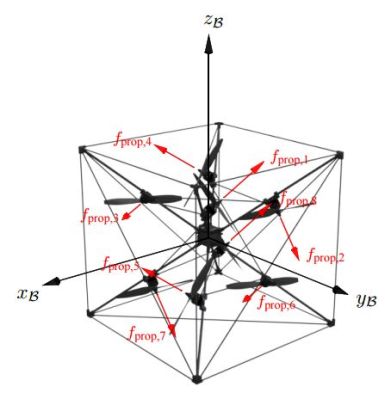
Each propeller is reversible to provide thrust in either direction. Also on the vehicle itself is a PX4FMU Pixhawk flight computer, eight motors and motor controllers, a four-cell 1800 mAh LiPo battery, and communication radios. Radio communication is necessary because the calculations for the position and outer attitude are done on a desktop computer, which then sends the desired force and angular rates to the vehicle. The desktop computer knows the vehicle’s position and orientation because they fly it in the Flying Machine Arena, a large room at ETH Zurich with an infrared motion-capture system.
The result is a bit eerie to watch as if gravity doesn’t apply to the Omnicopter. The flying machine can be just plain playful, as you can see in the first video below where it plays fetch by using an attached net to catch a ball. When returning the ball, it actually rotates the net to dump the ball into the thrower’s hand. But you can see that in the video.
While we’re trying different numbers of propellers, why not try just one, as a group, also from ETF Zurich, has done with their monospinner.
[via IEEE Spectrum]














Well the outfielders just lost their job to a robot. Maybe baseball will be exciting now!
Or you could play in an arbitrarily small sand-lot with any “homer” being caught before it breaks the neighbor’s window. Bring the great American pastime to inner-city spaces that aren’t large enough to play real baseball.
Of course, someone will try to export-control it because it generalizes out to defining a surface through which ballistic objects should not be allowed to pass, and that sounds an awful lot like missile defense…
It would certainly make golf watchable.
Well, let’s not aim ???????????? high.
Really interesting! Maybe a mini-cube could catch insects.
That audio editing though…
Yes, very cool project, but the audio coming out of only one channel and being weirdly tinny made me flinch a bit. Still watchable.
Super cool!
It’s a Tron bit.
very cool. i like that he actually solved the math optimization problem but just thinking about it makes my head hurt. >_<
How soon before this is completely untethered from the external cameras and processing?
Honestly I’m having trouble seeing how this could be used without external or sensors, while the external PC piping in commands is certainly useful, I think the PC’s external point of view is really what makes this work.
Could it be done without it? Maybe but I don’t think it would be a as smooth without the external point of view. We’ll have to wait and see if they come up with a version that can work that way,
That being said, I could see this being extremely useful in enclosed areas that need mobile surveillance like a warehouse or in a high security facility.
And yet YOU can catch a ball…..
Thanks, massively parallel cranial GPU!
It scares me how much matrix algebra is happening in my brain right now, It would be impossible for me to be able to comprehend it, because any realtime simulation of it in my brain would be forced to contain a realtime simulation.
Could be done already, though perhaps not with the same amount of positional accuracy.
A missed catch probably means either a damaged camera or prop. And then the whole thing crashes.
It is a proven concept. Your hand catches a ball with external input. There are large public spaces in England with enough cameras to do it now – if the camera timing is tweaked.
Very cool! Nice job!
When are they going to Train a Neural net to fly a QC
Great, a way to play fetch without the dog slobber. :-)
But what happens if you only *pretend* to throw the ball?
It runs the wrong way, gets confused and then looks at you kind of sadly?
ROTFL! Thanks for that.
The OmniCopter is nice but as others have observed the audio is out of phase between the 2 channels. Interesting sound effect, but disorienting.
> Attach a robot arm and the machine could position itself anywhere and move objects around as needed.
Uh Oh…
http://www.lexxmuseum.com/gallery/albums/userpics/10012/Arm.jpg
Omnicorn, like no other creature ever born, on its head is every manner of horn, the omnicorn’s the one.