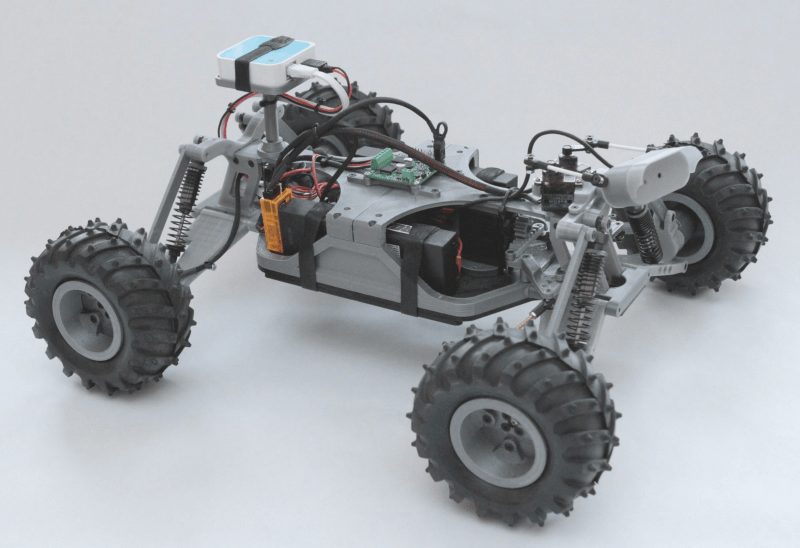
[Rick Winscott]’s RO-V Remotely Operated Vehicle instructable shows you how to make this cool-looking and capable robot. The rover, a 1/10th scale truggy, sports a chassis printed in silver and black PLA. It’s got a wireless router mounted on the back, and a webcam in a 2-servo gimbal up front. [Rick] made his own steering rack and pinion out of 3D printed parts and brass M3-threaded rods which he tapped himself.
The simplified drive system nixes the front, rear, and center differentials, thereby saving [Rick] on printing time, complexity, and weight — he was able to include a second 4000 mAH battery. A TReX Jr motor controller runs a pair of Pololu gear motors. All of this is controlled by a Beaglebone Black alongside a Spektrum DX6i 2.4Ghz transmitter and an OrangeRx 6-channel receiver. The DX6i [Rick] employs typically finds use as an airplane/quad controller, but he reconfigured it to steer the rover—the left stick controls direction and the right stick (elevator and aileron) control the webcam servos.
Enough talking technicals. We think this rover is pretty in the face. Much of this attraction owes to the set of Dagu Wild Thumper wheels (an entirely reasonable name) and the awe-inspiring 100mm shocks that jack up this whip so pleasingly. However, [Rick]’s elegant chassis and the silver-and-black color scheme doesn’t hurt one bit. The wheels are mostly for the cool factor, however—[Rick] recommends swapping out the relatively modest Pololu 20D gear motors in favor of higher-torque models if you’re planning any actual off-road extremeness. If you’re interested in making your own you can download the chassis files from Tinkercad or the BeagleBone code from Github.
If it’s other drone projects you’re after, check out the duct rover and solar wifi rover we published recently.














Shave 11 years off of your print just use an RC car
Yup, also probably a lot cheaper if you don’t buy the known-name ones but some off the usual suspects like hobbyking.
Funny – I just bought some flexible filament and was wondering “what tires should I print for this?”
Hah! Truth… so much truth.
Since this is based on the OpenRC project… options are many!
https://www.thingiverse.com/thing:526969
With regard to printing tires out of flexible filament that is.
If only we had some decent brushless hub motors for cars like these… I’m wondering if some of these low-KV motors designed for brushless gimbals could actually work. Just not shure if the torque and speed are anywhere near the required specs or if you would need to make your own by taking an existing outrunner motor and rewind it for lower speed and higher torque.
Wonder if there are any problems using 2.4ghz control with presumably 2.4ghz wifi for the camera. I have done this myself and it worked great around the house but had very little range so defeated the purpose of a rover for me. I still have not found a solution for long range control and high def video feed without spending a fortune. I like his design though – I used a tank chassis and its not the way to go I would also choose a truggy for the next rover. You know that took some time to design and print! Nice work!
I also used a tank as a base, 20″ or so model so not small. I used 1 stationary and 1 turret mounted cameras (wifi). the rc ran off 2.4ghz. I was able to run it under the length of my house with fairly little trouble. It did throw a track, but I attribute that to the cheaper plastic tracks, but metal ones are available. Total range obviously was limited to not much more than a house, but damn if it isn’t fun just to drive around the cul-de-sac!
Link: https://drive.google.com/open?id=1QPJk1u5C0U5KeC80Svnlb28pX8B_H8u_