Why bother crawling into that tiny sewer tunnel and getting coated in Cthulhu knows what — not to mention possibly getting stuck — when you can roll a robot in there instead? That’s what InspectorBot does. It’s [Dennis]’ entry for The Hackaday Prize and a finalist for our Best Product competition.
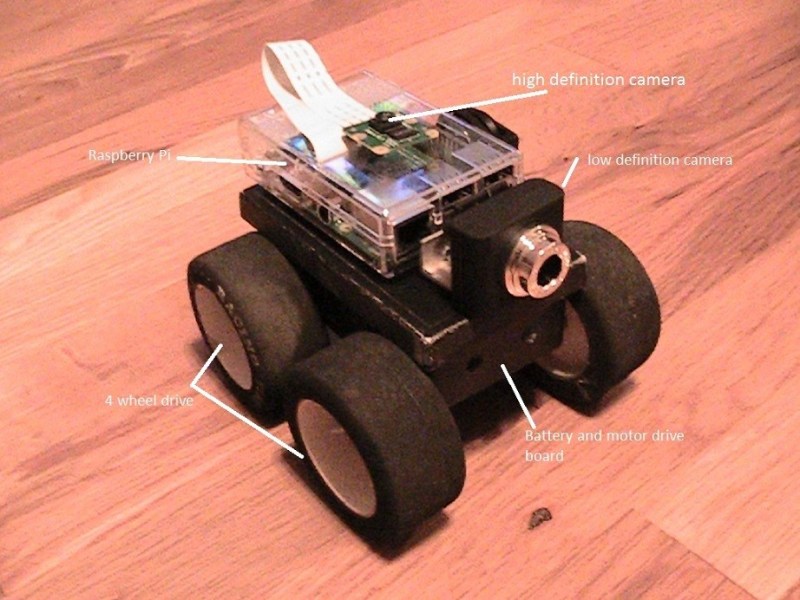
InspectorBot is a low-profile rover designed to check out the dark recesses of sewers, crawlspaces, and other icky places where humans either won’t fit or don’t want to go. Armed with a Raspberry Pi computer, it sports a high-definition camera pointed up and a regular webcam pointing forward for navigation. It uses point-to-point WiFi for communication and rocks all-wheel drive controlled by a pair of L293D motor drivers.
This seems like fertile ground for us. Pipe-crawlers, chimney-climbers, crawlspace-slitherers all sound like they’d be helpful, particularly in conjunction with some kind of computer vision that allowed the robot to notice problems even when the operator does not. Right now, [Dennis] has the chassis rolling and most of the current work is focused on software. Both cameras are now working, allowing the InspectorBot to send forward-looking and upward-looking video back to the operator at the same time. This, alone, is a great advancement of the current crop of Raspberry Pi rovers and adds a lot of functionality to an easy-to-build platform.
















Doesn’t something like this already exist?
That’s irrelevant. Many things already exist, does that mean nobody should ever spend time working on re-inventing them?
The bot’s utility is limited in that it’s only useful if the thing you want to inspect in high-def is above. If the interesting thing is in front or to the side, you’ve only got the limited navigation cam.
Perhaps you could put a mirror at a 45-degree angle above the top camera. Mount it on a rotating frame, so that by rotating the mirror you can look at any side of the bot. Another mechanism could retract the mirror, so you can look straight up.
The mechanism involved might be prohibitively complex, but I’m sure someone else can think of a simpler way to mount the mirror. Maybe give up the 360-degree vision, and just move the mirror into and out of place for a choice between front and top viewing?
Don’t forget to have the software flip the image when the mirror is deployed.
Or mount camera on a simple two axis pan/tilt mechanism with servos.
If the bot is strong enough to pull a small leader string, it’d be useful for fishing cables through crawlspaces and such too. Would have loved something like that for electrical remodeling!
We have trained mice to do that…
The ones we use at work are made of Aluminum and look like they have gone threw a war or two.
And you have to have a cable that is super strong to pull it out if need be. Because if the robots were to get stuck. It could cost 10s of millions of dollars or even more, to remove. I’ve used them in electrical power plants here in Ontario. and even in one of the new Hospitals in southern Ontario. To locate a plug in a pipe that was in a floor in the hospital. To find out someone had put a paint can in the pipe. We ended up using acid to dissolve the can. It saved a lot of money and time not having to open the floor up.
But over all I can tell you these little robots are very very handy.
Great job.