Hackaday likes the idea of fine-tuning existing hardware rather than buying new stuff. [fishpepper] wrote up a tutorial on rewinding brushless motors, using the Racerstar BR1103B as the example. The BR1103B comes in 8000 Kv and 10000 Kv sizes, but [fishpepper] wanted to rewind the stock motor and make 6500 Kv and 4500 Kv varieties — or as close to it as he could get.
Kv is the ratio of the motor’s RPM to the voltage that’s required to get it there. This naturally depends on the magnet coils that it uses. The tutorial goes into theory with the difference between Wye-terminated and Star-terminated winding schemes, and how to compute the number of winds to achieve what voltage — for his project he ended up going with 12 turns, yielding 6700 Kv and 17 turns for 4700 Kv. His tutorial assumes the same gauge wire as the Racerstar.
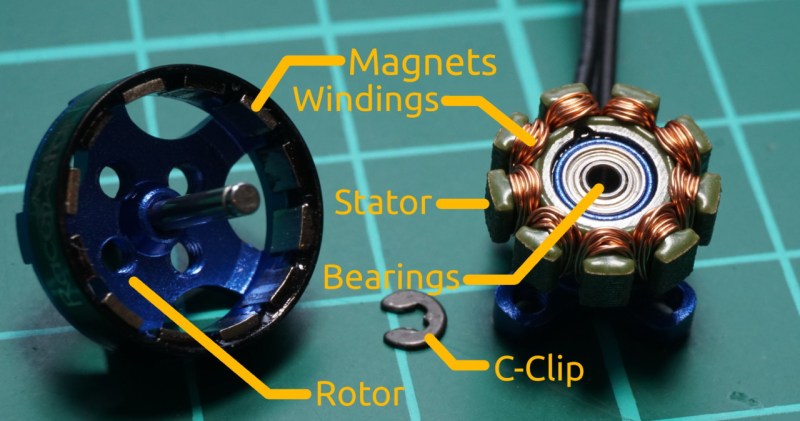
Just as important as the theory, however, the tutorial also covers the physical process of opening up the motor and unwinding the copper wire, cleaning the glue off the stator, and then rewinding to get the required stats.
[fishpepper]’s handle has graced Hackaday before: he created what he calls the world’s lightest brushless FPV quadcopter. In addition to motors and drones, he also rocks a mean fidget spinner.













Wye and star are equivalent. Delta is the other termination scheme.
You beat me to it.
I’ve rewound one motor (because it had damaged coils). I did it over Thanksgiving at a point when I had nothing else I could do. Since then, I’ve just not had that kind of time to rewind the various other motors I have with damaged coils. It’s just too easy to order new ones instead. I suppose I should pass them on to folks with more “free” time.
Maybe one of those “back in the day” skills that’s not pursued as much due to how cheap things have become.
That’s why hardly anyone stocks dial cord anymore.
Maybe things will not be cheap forever
+1
Dude. You were right
Probably more worth doing on larger, more expensive motors.
Ugh, this seems like so much work to me – is it really worth doing it?
Rewound a 110v compressor for 220v, same winding scheme twice the wirelength and number of windings. Walked up and down my garden the same 60ft for 5 hours, left me with a headache and blistered hands. Winding a brushless model motor is easy peasy, takes ten to twenty minutes and the copper wire is thick so it stays in place. Rewinding a quadcopter motor for lower KV makes it more torquey at lower rpm, som the quad can swing a bigger prop for better aerodynamic efficiency so longer fly times. Went from 6.2A in hover to 4.5A
I suspect you could have gotten the same result with a different prop. Picking the right size and pitch of a prop is basically the same as picking the right gear
That is not what I was trying to. Matching the prop to your motor gives the lowest power consumption, but prop efficiency is just the bigger the better, so rewinding the motor to go beyond the largest realistic prop size for a certain motor is beneficial. The reason for winding a motor to other specs is either because there’s no motor fitting your specs and for some reason, low KV motors are more expensive, possible thicker wire is harder to wind?
Probably more of a case of supply and demand..
I think it’s mainly a matter of getting the most power out of a given mechanical frame. Since motor power is proportional to torque * RPM, there are two ways to get more power: higher torque or higher speed. Higher torque requires larger wire, which is both more expensive and there’s a limit to how much copper you can fit into the spaces in the stator. Higher speed just means more voltage, up to the point where you start demagnetizing your permanent magnets. And with neodymium magnets, that would take a lot of speed.
If you look at the specs for multiple motors that clearly use the same mechanical parts, the higher KV models are usually rated for more power.