Humans can traverse pretty much any terrain thanks to their legs and fast-acting balancing system. So if you want a robot which should have equal flexibility, legs are a good way to go, this confirmed by all the achievements of Boston Dynamics’ robots. It was therefore natural for [Mike Rigsby] to model his robot dog after Boston Dynamics’ dog-like robot, SpotMini.
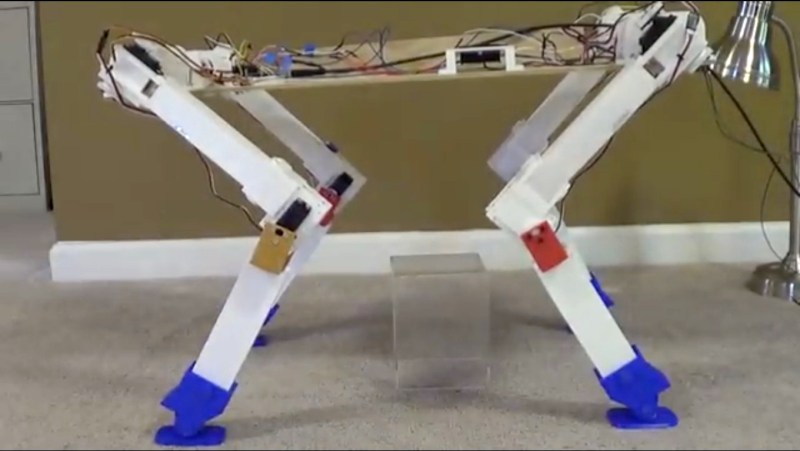
The build log on his Hackaday.io page makes for interesting reading. For example, he started out with the legs oriented like SpotMini but found that when trying to stand, the front legs worked fine but the rear ones slid or the dog shifted rearward or both happened. His solution was to take a cue from his 1990s Sony robot dog, Aibo, by reversing the orientation of the rear legs. He then upgraded his servo motors to ones with double the torque and increased the strength of the legs’ structure. In the first video below, you can see that his dog now lifts itself up to a standing position perfectly.
So far, to give it more of a dog-like personality he’s mounted Google’s AIY Vision Kit which changes a light’s color based on the degree to which a person is smiling, though we think a wagging tail would work well too. The possibilities are endless but one step at a time. See the second video below for a demonstration of the use of the Vision Kit.
[Mike’s] entered his robot dog in the Hackaday Robotics Module Challenge, and rightly so. He talks about how the legs can be used as modules for other robots, but we think a four-legged walking platform would also be great as a module. All sorts of functionality can be added on top once he has the legs walking. There are the obvious neck and head, robot arms, and carrying platform all of which can help in the garden but can also help the sick or the elderly. On the whimsical side, it can be outfitted with cat counter-measures or act as a beer delivery system. What would you use it for?
















I worked on this one at university. https://www.youtube.com/watch?v=jgIpka7kXLA
You need lots of motor power in the joints to get something of locomotion.
Nice. I like the way you manipulate the lower leg using a cable. I guess that was to keep the motor’s weight off the leg itself.
Indeed, but in hindsight, some kind of pantograph mechanism would have been better, as with the rope, the motors have to overcome the springs that are used to stretch the legs.
Sort of like an Anterior Cruciate Ligament (ACL)!
“Humans can traverse pretty much any terrain thanks to their legs and fast-acting balancing system. ”
Pogo-style locomotion.
Open Cat is years ahead of this, look to them to advance what you have.
Open Cat is impressive. Too bad it’s not open source (as the name would imply), since he has filed a patent for it.
But then how would he make kits off opensource?
By selling to the too rich/lazy to use open source…
Reading though he did the hard work that the “open sourcers” weren’t willing to do, so yes the rewards go to him.
https://www.hackster.io/petoi/opencat-845129
HaD could learn a thing or two from hackster.io — so much easier to navigate than HaD project pages.
Patents & open source are not mutually exclusive. Seems like the open cat project owner has a really good understanding of just how much work open source is – done properly it’s not just a bunch of source files, and he seems committed to doing it properly but that takes time.
I’ve seen Metalhead, I know how this ends…