Surely our readers are well aware of all the downsides of owning an airplane. Certainly the cost of fuel is a big one. Birds are a problem, probably. That bill from the traveling propeller sharpener is a killer too…right? Alright fine, we admit it, nobody here at Hackaday owns an airplane. But probably neither do most of you; so don’t look so smug, pal.
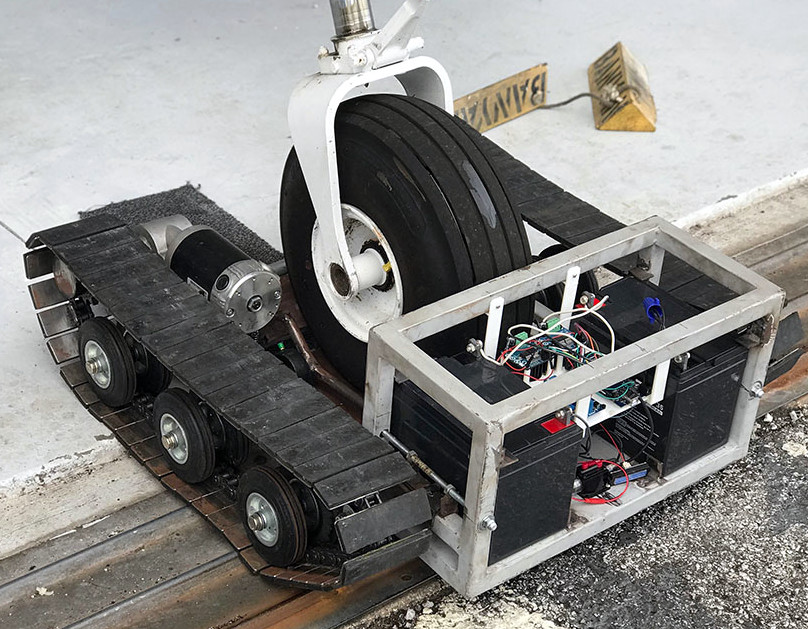 But if you did own a plane, or at least work at a small airport, you’d know that moving the things around on the ground is kind of a hassle. Smaller planes can be pulled by hand, but once they get up to a certain size you’ll want some kind of vehicle to help out. [Anthony DiPilato] wanted a way to move around a roughly 5,200 pound Cessna 310, and decided that all the commercial options were too expensive. So he built his own Arduino powered tank to muscle the airplane around the tarmac (if site is down try Google cache), and his journey from idea to finished product is absolutely fascinating to see.
But if you did own a plane, or at least work at a small airport, you’d know that moving the things around on the ground is kind of a hassle. Smaller planes can be pulled by hand, but once they get up to a certain size you’ll want some kind of vehicle to help out. [Anthony DiPilato] wanted a way to move around a roughly 5,200 pound Cessna 310, and decided that all the commercial options were too expensive. So he built his own Arduino powered tank to muscle the airplane around the tarmac (if site is down try Google cache), and his journey from idea to finished product is absolutely fascinating to see.
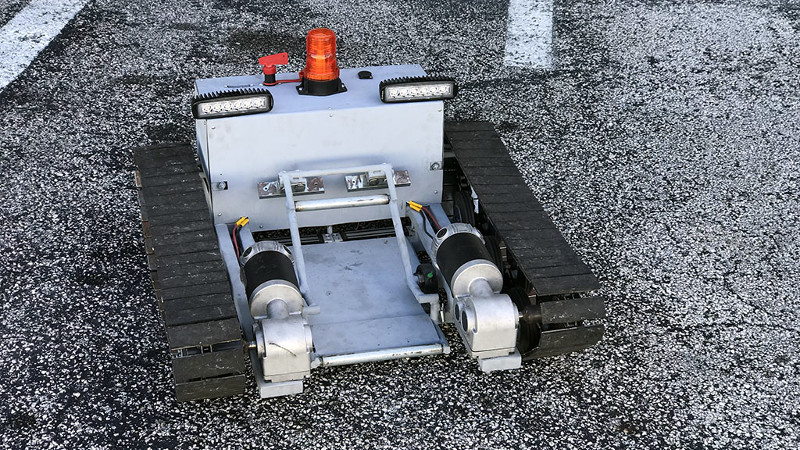
So the idea here is pretty simple. A little metal cart equipped with two beefy motors, an Arduino Mega, a pair of motor controllers, and a HC-08 Bluetooth module so you can control it from your phone. How hard could it be, right? Well, it turns out combining all those raw components into a little machine that’s strong enough to tow a full-scale aircraft takes some trial and error.
It took [Anthony] five iterations before he fine tuned the design to the point it was able to successfully drag the Cessna without crippling under the pressure. The early versions featured wheels, but eventually it was decided that a tracked vehicle would be required to get enough grip on the blacktop. Luckily for us, each failed design is shown along with a brief explanation about what went wrong. Admittedly it’s unlikely any of us will be recreating this particular project, but we always love to see when somebody goes through the trouble of explaining what went wrong. When you include that kind of information, somewhere, somehow, you’re saving another maker a bit of time and aggravation.
Hackers absolutely love machines with tank treads. From massive 3D printed designs to vaguely disturbing humanoid robots, there’s perhaps no sweeter form of locomotion in the hacker arsenal.













I think his site just got hackadayed. Poor database didn’t see that coming.
try google cache:
http://webcache.googleusercontent.com/search?q=cache:6phOJsGknMMJ:anthonydipilato.com/2018/06/08/aircraft-tug/+&cd=1&hl=de&ct=clnk&gl=de
I added a link to the google cached version.
No kidding, I have my blog on a ec2 micro instance. Now I know where that traffic spike came from.
Sounds like a mini taxibot, they use them at the Frankfort airport instead of jet-taxiing or getting a manned tug. The Taxibot drives up, hooks up, and then the pilot steers with rudder pedals like normal, not sure how they control acceleration form the cockpit though.
https://en.wikipedia.org/wiki/TaxiBot
They already have a manual steering electrical drag helper thing, looks kinda like a pallet jack, for larger private planes.
For something like a cessna sitting on the tail to lift the nosegear and walking backwards is enough if the wind is calm, though I have seen a nosegear bar where you can human tug the plane and nosegear steer it too.
Not sure how you would move a taildragger alone.
The wiki didn’t have any photos,
so here is the mfgr’s website.
http://www.taxibot-international.com/
You grab the handle lift and haul it anywhere. It’s easy.
Speed and direction are controlled “with aircraft wheels resting on a rotating platform, translating nose-gear deflections into directional changes for the tug. Aircraft wheel brakes are used for deceleration. Forward speed is also controlled by braking.”
So if the platform the wheels are on stops rolling, the TaxiBot comes to a stop. When the brakes are released it will start rolling again and the TaxiBot keeps moving forward.
Nice build! He wasn’t kidding that the commercial alternatives are expensive – WOW
When I saw the lead picture, I assumed from the size that this was a tow tractor for medium to large R/C airplanes. I didn’t expect something of that size could tow a real Cessna! Very impressive.
Arduino’s are great for prototyping and small inexpensive projects….but trusting a half million dollar (or more) aircraft to one? No thanks. I can imagine that the insurance company is going to toss your claim when it finds out that it was your home made tug bot that ripped the wing off against the hangar door because the $30 device controlling it decided to forget it’s firmware.
I’ve never seen any microcontroller, whether it uses the Arduino HAL or not, “forget” it’s firmware. At least, not without wrecking the whole device, sledgehammer style.
There is absolutely nothing wrong with the hardware. Your expensive “professional alternative” would be running on chips that are even cheaper.
If you’re going to cast aspersions, make them at least vaguely plausible. “forget it’s firmware” seriously what
Obviously you have not spent much time dealing with cheap micro controllers. Spend 5 minutes googling around and you will find a few hundred thousand examples of arduino boards glitching out for absolutely no reason. I think the project is a neat idea…..but I wouldn’t trust a cheap Chinese micro controller in an instance that involves tens to hundreds of thousands of dollars and a few hundred gallons of fuel.
Also I don’t believe I said anything about a “professional alternative”. If you are going to act like a drama queen and bash other people’s posts to make yourself feel important, at least know what the hell you are talking about and don’t put words in their mouth.
You obviously have no idea what you’re talking about since you call Arduinos a “cheap Chinese microcontroller”. Arduinos are built in the US by Adafruit, and in Italy as well. And the microcontroller they use, the Atmega328P, was designed by Atmel, an American company who manufactured the chips in France and Germany, which was then acquired by Microchip, another American company, whose chips are manufactured in Thailand and the Philippines
I’m sure you’ll be thrilled to know that Cessnas as well as Boeings are chock-full of not substantially different microcontrollers from the ones in arduinos.
>I think the project is a neat idea…..but I wouldn’t trust a cheap Chinese micro controlle
I can assure you, from personal professional experience, that Atmel AVR microcontrollers are neither cheap (in terms of quality) nor Chinese.
I can also assure you, from personal professional experience, that the avionics in every MQ-9 Reaper drone contains actual cheap Chinese knock-off parts.
Yeah, it’s not like my day job is literally writing firmware for them or anything… o_o;
To be fair, that plane isn’t worth anywhere near half-a-million. It’s a C310G http://registry.faa.gov/aircraftinquiry/NNum_Results.aspx?NNumbertxt=2928R , and the going rate for a 310 of similar vintage is $50k – $100k. Small planes (especially older twins) are not worth nearly what people think they are.
Keep in mind simple is reliable.
Dunno about arduino hardware reliability, but does seem ok if you avoid the China stuff. But there are significant problems with arduino loaders and code libraries.
The problem with Tesla is not necessarily the hardware; it is the code. Software is the weak point for much stuff.
>device controlling it decided to forget it’s firmware
First off, that device is an Atmel ATmega2560.
http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-2549-8-bit-AVR-Microcontroller-ATmega640-1280-1281-2560-2561_datasheet.pdf
It’s an older chip, yeah, but it has a long history of reliability in industrial applications.
It has 256KB of flash memory. That’s Atmel Flash, some of the most reliable in the world. I can tell you from experience that the flash memory and internal EEPROM on this chip are produced with some of the highest quality and most stringent testing in the industry. Nothing comes close to Atmel/Microchip memory in terms of quality, endurance, and retention. If you have a manufacturer that produces more reliable silicon than Microchip/Atmel, I’d love to hear about them.
Second, if your ATmega “forgets” its firmware, it’s not for “no reason”. It’s because you don’t know what you’re doing.
Lastly, I suggest getting a little industry experience before you start criticizing things you don’t know anything about. As someone who’s built professional, industrial, and very professional embedded control systems for industrial, military, and aerospace applications, let me tell you a secret. Those “cheap Chinese micro controller” you’re so worried about are already in use on every airplane you’ll ever fly on, every spacecraft you’ll ever see, and every military UAV you’ve ever seen on the news.
I’d trust an ATmega microcontroller with my life long before I trusted anything Raytheon outsourced.
Looks familiar…
https://youtu.be/bEsIz00Prn8
2700-10,000 ?!
Boy are they gouging people. Though I suppose the liability of breaking someone’s plane accounts for some of that price tag.
One of the many trials of owning an airplane.
https://images-na.ssl-images-amazon.com/images/I/51Qzsm22sKL.jpg
Version 2.0 will remove and place the wheel chocks as part of its operation?
Funny thing with all these Arduino articles is HB has a lot of SBC books in their latest, although I don’t think the above is in any of them.
If it’s powered by Arduino I guess those two SLA batteries are in fact control units :)
Balance Ballast!
Good project.
If you can make something that is useful great.
And yea I’ve done a lot of things that if I went to buy the item and It cost $500
and I can make almost the same thing ‘And I usually add more bells and whistles’ that would never be on the boughten item. And have it cost me $30 – $40 instead, I’m going for it.
Nice work.
One question.
Why blue tooth. I would of gone with something more secure.
Sorry for the late reply just found this post.
I went with bluetooth because it is the most convenient. That way you always have the controller in your pocket. It is really only used to pull the plane in and out of the hangar and the plane is kept in a low traffic area of the airport. So security is not really a big deal.
Hi anthony,
I just found your tug on youtube. Im verry interested in the tug for my a36 bonanza. Can you make a tug for me?
Really like the mechanical design. Simple and utilitarian.
But, after a bit more thought, will guess that the ‘weak link’ is not the arduino, nor is it necessarily the code. A common point of failure in this environment is poor immunity to radiated emissions. The code can easily mitigate loss of control signal, but can the system endure incorrect commands resulting from corrupted data transmissions in a high RF noise environment ? Could a big RF signal make the motor drive go crazy? What about errant Romulan disrupter beams?
> can the system endure incorrect commands resulting from corrupted data transmissions in a high RF noise environment ?
Good question. I’ve had to overcome this same issue before, and it isn’t terribly difficult. A simple checksum at the end of a command is enough, and if the checksum doesn’t match then the device sends back a request to retransmit.
Sorry for the late reply, I just found this post.
I have the tug connecting to my phone via bluetooth. All of the commands have timeouts to keep it from running away after a disconnect.
As for incorrect commands from corrupted data and interference, I don’t really know enough about bluetooth have an answer for that. But I haven’t noticed any thing like that happening.
Sorry for the late reply, I just found this post.
I have the tug connecting to my phone via bluetooth. All of the commands have timeouts to keep it from running away after a disconnect.
As for incorrect commands from corrupted data and interference, I don’t really know enough about bluetooth have an answer for that. But I haven’t noticed any thing like that happening.
damn those Romulan’s !! Damn them all to Hell !!
Not only do I own a plane (a $20,000 Long EZ) but I did my multi on a 310R in Killeen, and fondly(ish) recall hauling that damn thing around. We generally preferred not to, but sometimes (e.g. if there was a line for fuel) it was more of a pain to sit there with the engines running or stop/restart them. Only got to taxi it into a hangar once, and that was pretty exciting. Have to trust the people waving you in :)
Anyway, I’ve wanted something like this for the Long EZ. Ground handling those is a pain because if you put it up on its nose gear it has a tendency to want to dump itself backwards, and it’s kind of hard to steer without the gear mostly extended, so you leave the nose gear up and kind of hump it around by the canard…way more of a pain than moving the 310 around.
Hi. I am very impressed with Anthony’s perseverance in this project, and that he did a great job documenting it.
If I had half his talent, I would build the tug myself. I have a single engine 4-seater ‘plane that is about 800 kg.
Pulling it out of the hangar is getting harder, as I get older (I’m 67)….. and the pad between hangar & taxiway is very slightly uphill, so that I have to lean right back to get it out onto the taxiway. Some clever people are using towbar with 18v drill as a motor, turning a roller pressed against the nose-wheel.