[Angus] at Maker’s Muse recently created a new and tiny antweight combat robot (video, embedded below) and it has some wonderfully clever design elements we’d like to highlight. In particular: how to keep a tracked robot’s wheel belt where it belongs, and prevent it from slipping or becoming dislodged. In a way, this problem was elegantly solved during the era of the steam engine and industrial revolution. The solution? A crowned pulley.
A crowned pulley is a way of automatically keeping a flat belt centered by having a slight hump in the center of the pulley, which tapers off on either side. Back when steam engines ran everything, spinning axles along the ceiling transferred their power to machinery on the shop floor via flat belts on pulleys. Crowned pulleys kept those flat belts centered without any need for rims or similar additions.
The reason this worked so well for [Angus]’s robot is partly its simplicity, and partly the fact that it works fantastically with the silicone wrist bracelets he uses as treads. These bracelets are like thick rubber bands, and make excellent wheel substitutes. They have great grip, are cheap and plentiful, and work beautifully with crowned pulleys as the hubs. It’s a great solution for a tiny robot, and you can how it self-centers in the image here.
Antweight robots are limited to 150 grams which means every bit counts, and that constraint leads to some pretty inventive design choices. For example, [Angus]’s new robot also has a clever lifter mechanism that uses a 4-bar linkage designed to lever opponents up using only a single motor for power. Watch [Angus] explain and demonstrate everything in his usual concise and clear manner in the video, embedded below.
Continue reading “A Crowned Pulley Keeps Robot’s Treads On Track”







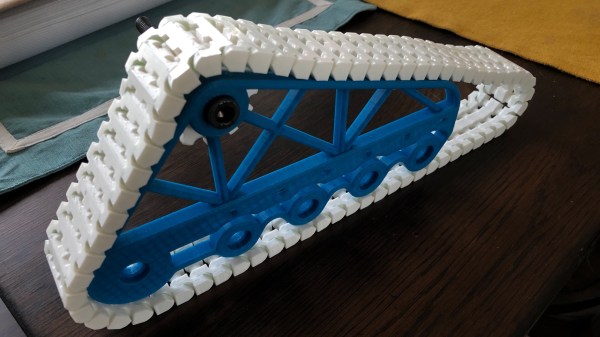
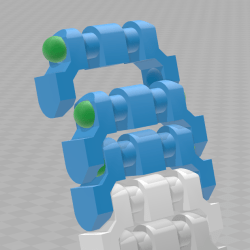 Each segment has hollows made to snugly fit 6 mm BBs (shown as green in the image here) which serve both as fasteners and bearing surfaces. Assembly requires a bit of force to snap everything together, but [AlwynxJones] judges the result worth not having to bother with bolts, wires, or other makeshift fasteners.
Each segment has hollows made to snugly fit 6 mm BBs (shown as green in the image here) which serve both as fasteners and bearing surfaces. Assembly requires a bit of force to snap everything together, but [AlwynxJones] judges the result worth not having to bother with bolts, wires, or other makeshift fasteners.