We’ve written about a lot of DIY robotic arms. Some of them are high-performance, some are inexpensive, and some are just uniquely fun. This one certainly falls into the last category; whilst watching an episode of Black Mirror, [Gear Down For What] was struck by inspiration for a thin robotic limb. After some iterations he has a final prototype, and it’s quite something to see in action.
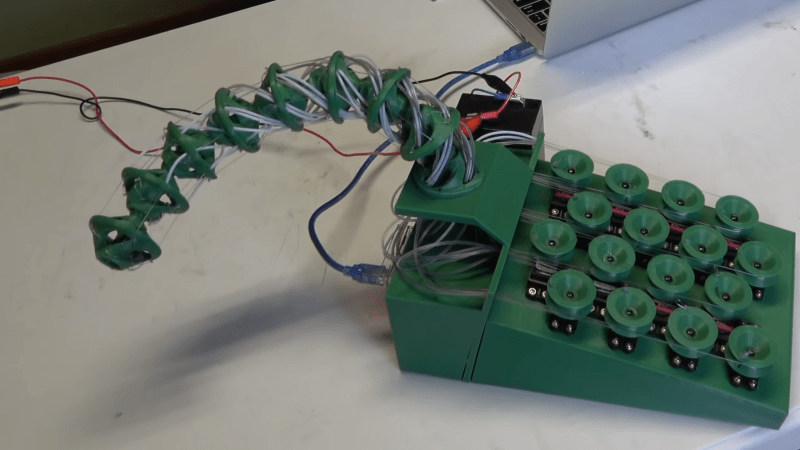
To make a robotic arm as slender as possible, the actuators can’t be mounted on the arm itself but must instead drive the arm remotely. There are a number of ways of doing this, and though [Gear Down For What] considered using pneumatics or hydraulics, he opted to keep it simple with RC servos which produced a nifty solution that we really like.
The arm is made out of a series of 3D printed ball joints, allowing rotation in any direction. The tricky bit is transferring the force from the servos to each joint. Initially bare fishing line was considered, but this made the remote joints difficult to control when lower joints were moving. The solution was to use the fishing line inside of tubing, similar to the way that bike brakes operate. This allows the force to be carried to the appropriate joint regardless of lower movement. Each joint needs an x and y tension to allow it to rotate in any direction, which means an army of sixteen servos is needed to operate the eight segment arm.
Robotic arms are always fun to build and we’ve seen some pretty neat uses for them, such as mapping magnetic fields in 3D, or teaching sign language.














Now cover it in latex and make a fortune.
He already named it Richard :D
5:21. He might want to rename that.
Hmm, I see what you did there but, you missed the extra ‘h’ should be Rich and Hard ;-)
tehe.
It needs more BLDC and less servos, and throw in a few cycloidal speed reducers, because high speed is not good for all applications ;)
I am 100% sure cats would hate this thing. :-)
Confirmed. My cat was on my lap when I was watching. He likes to watch videos with me. When it started moving, he freaked out and ran.
:-)
You could make a great animatronic dragon with pretty near the same system. I’d like to see that. :-) (Awfully noisy while it moves though)
Need 3 more for legs on the robodog. Perhaps a 4th for the tail.
I was thinking same episode. Just needs a sinister pop-out pistol for the headshots.
If it were scaled up, it would make a great prosthetic elephant penis. They have the most prehensile penis of any mammal.
On land sure, the approx 9ft tough fibrous penis of the blue whale could knock an adult elephant out as not only is it prehensile but, incredibly it levers strongly against the female to hold her position, something similar to Japanese cults exercise regime extending male penile length and orgasms to 20mins. It’s also interesting the blue whale’s brain is much less in mass than its penis, that ratio in mammals might offer clues to some human’s potential evolutionary path depending on their socio-economic-intellectual motivations through life ;-)
WTF did I just read?
A pertinent reply to NQ who wrote about the elephant penis being prehensile, it’s the comment just before mine, yeah weird world isn’t :-)
LOL! Thanks for sharing Mike. :)
I thought the same thing LOL
:)
http://vignette3.wikia.nocookie.net/strife-official/images/e/e9/What_did_I_just_read-meme.jpg
LoL – Nice one Robert Mateja, When a a picture paints a thousand… ..chuckles.. of the nice kind :-)
Although a nicely executed build, I take exception to the way the guy seems to be implying throughout that he came up with the tentacle mechanism, which has been around since at least the 70s and used in countless films for props such as the chestburster in Alien, through to all manner of tails and elephant trunks
Same mechanism is also used in some surgical robots.
I do not think his intention is to claim to have “invented” the “tentacle mechanism”. He just tries to explain his reasoning on how his robotic leg build iterated to a robotic pen.. holder..
thats how OC robotics used to do it
A future prop in a certain nation’s specialty videos? Or perhaps it will find favor with a specific crowd who like to dress up in costumes that might need an extra appendage.
I know recently there were the articles here on how to build a similar manipulator controlled by multi-axis “control stick”, care to post in the comments more examples of this kind of tentacle-like mechanism? There was a neat one for tentacles in the Hell-Boy movie, but I could not find the video again.
Repeat for ADD folks:
More build examples in the comments please!