
Tiny motors used for haptic feedback and vibration come in a variety of shapes and sizes. The most familiar is the “eccentric rotating mass” (ERM) variety which just spins an imbalanced weight on a small motor and comes packaged in two form factors. The classic is the pager “pager motor” which just looks like a tiny, adorable motor and the squat cylindrical “pancake style”. ERMs are simple to use but provide imprecise response when compared to their new-age cousin the “linear resonant actuator”. Unlike the motor in an ERM, LRAs are typically an enclosed mass on a spring placed near a coil which pushes the mass back and forth. The name LRA might not be familiar but Apple’s branded implementation, the Taptic Engine, might be a little more recognisable.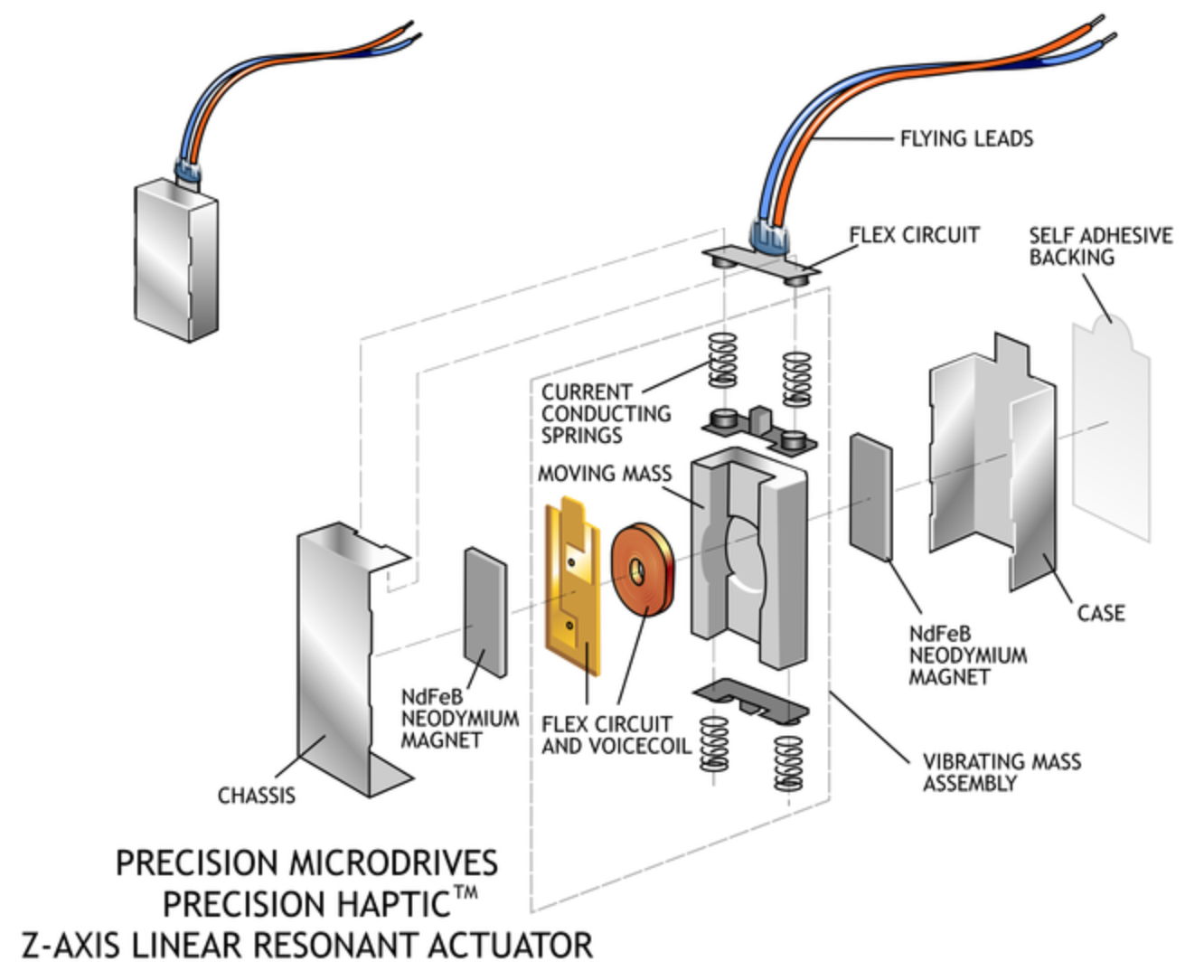
[Precision Microdrives] is a vendor of these sorts of devices who happens to have a pleasantly approachable set of application notes covering any conceivable related topic. A great place to start is this primer on ways to drive motors with constant voltage in a battery powered environment. It starts with the most simple option (a voltage divider, duh) and works through a few other options through using an LDO or controller.
If you’re thinking about adding haptics to a project and are wondering what kind of actuator to use (see: the top of this post) AB-028 is a great resource. It has a thorough discussion on the different options available and considerations for mounting location, PCB attachment, drive modes, and more. Digging around their site yields some other interesting documents too like this one on mounting to fabric and other flexible surfaces. Or this one on choosing PWM frequencies.














Piezo actuators:
http://www.ti.com/lit/an/slyt483/slyt483.pdf
Their (precision microdrives) vibration actuators work great and they do indeed provide a lot of information how to properly integrate those vibration actuators. I happen to know because I got some ERM from them and wrote a software driver for the DRV2605 Haptic Controller ( Example: https://github.com/lxrobotics/spectre/blob/master/examples/driver/haptic/DRV2605/driver-drv2605-i2c-atmega328p/driver-drv2605-i2c-atmega328p.cpp ). Adafruit has some breakout boards and also a Arduino library ;)
Wow, I started googling this fancy “Taptic engine” and I’m shocked how much space it takes in iPhone 7. It’s almost as big as speaker resonant chamber.
Yeah, it’s interesting they chose to devote so much precious space to it. But an LRA feels SO much better. And of course they branded it.
Big engine=big feedback.
More like “big engine = compensating for something” ;)
I just want to say, that as a Christian man. I am deeply concerned that the greater accessibility to low cost vibrators is going to boon for the diy sex toy industry. The last thing we need is young makers engaging in sinful behavior by 3D printing sex toys and using them for “educational purposes”.
Why is it any of your concern what they do with their printers or bodies?
I’m pretty sure he’s joking.
This was surely a troll
Speaking figuratively, you’ve got nice low resistance buttons and Patrick can’t resist pushing them. Who here can’t resist pushing a seductive button or two now and then? The office supply store STAPLES knows that. :-)
Brings a whole new meaning to the “(She’s) Easy button.”
There’s already finger-worn teeny little rings in the pound shop using what are surely phone vibrator motors, if you fancy some of that pound-shop sex.
I should point out I am in the UK, to preclude any misunderstandings of “pound shop”.
Not embarrassed to plug a new chip I’ve spent the last year working on!
DA7280 : 360nA of power consumption whilst it’s not being driven and way more flexible than the ol’ TI part! :)
https://www.dialog-semiconductor.com/products/da7280
Which type of motor should I use – and how to drive it? The target is to replicate the soundshirt. 16 of them distributed on a shirt and driven by music. Basically stereo and eight frequency bands each, but not just on off – probably PWM driven, I bought 10 flat and 10 rund ones at ebay – not switched them on yet. Could drive them one each – there are 25 MSP430G2553 boards with VFX Forth on it waiting for ideas for driving it.
OK, the soundshirt https://www.youtube.com/watch?v=a8fVoJRI7V0 as a more basic implementation is a long term project and might find others here that are interested or even contribute. The initial easier projects for testing are to output morse code – and for our TPS / MyCO PLC the output of 4 bits in parallel to the 4 LEDs see simulator and Arduino soon at https://www.amazon.co.uk/Juergen-Pintaske/e/B00N8HVEZM and more and free info at http://wkla.no-ip.biz/ArduinoWiki/doku.php?id=arduino:arduinosps:spsemu It is basicly like MEMOTY FOR PROGRAMMERS …