Virtual reality holds the promise of an immersive experience that can satisfy our senses to a level comparable with… well, reality. The field has come a long way, but Sarah Vollmer makes a good point that many of the VR systems currently in use are bulky and difficult to transfer from person to person.
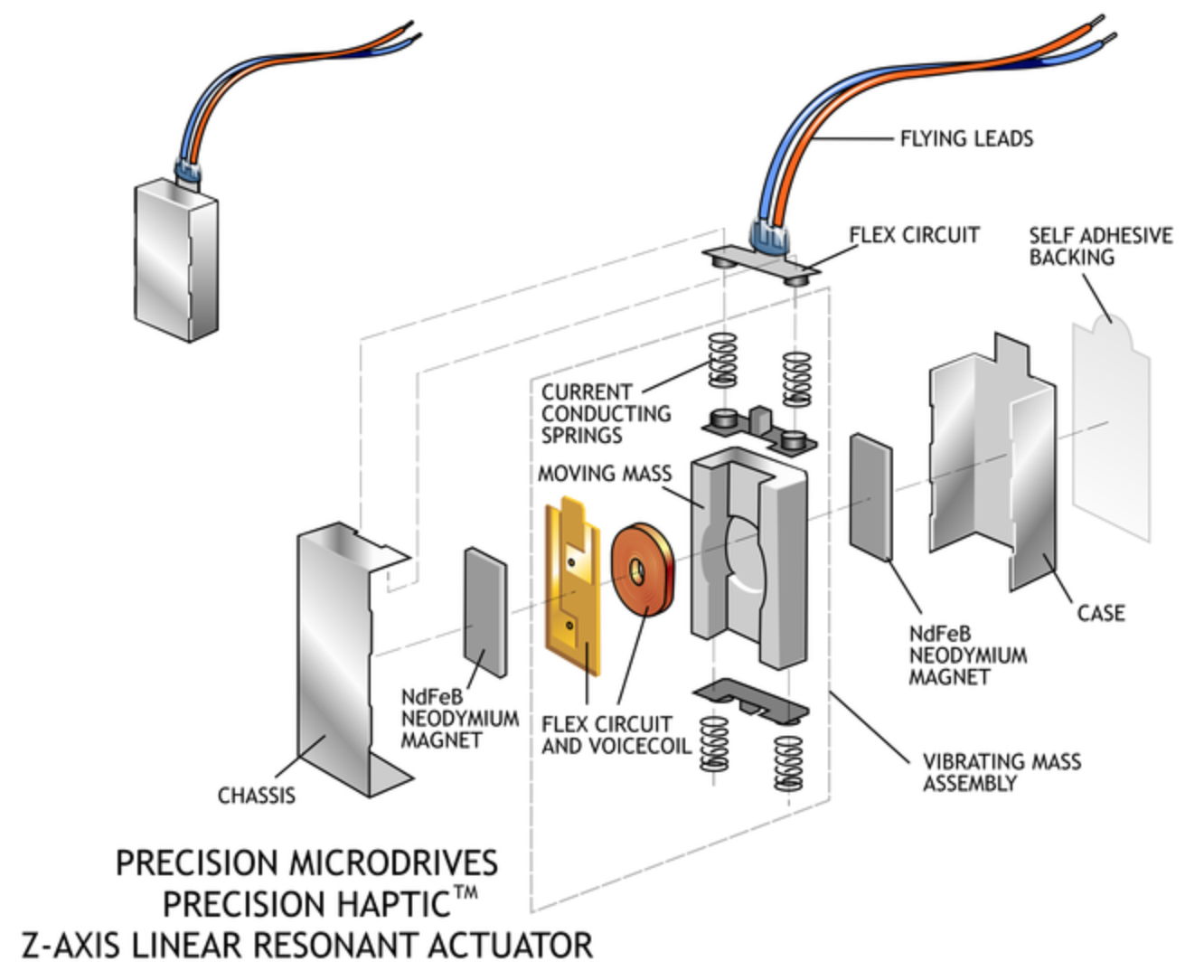
While headsets have become smaller and lighter and now feature improved motion tracking and resolution, their ability to affect the user’s other senses hasn’t seen nearly the same advancement. Haptic feedback systems need to catch up with headsets, and how to unobtrusively allow users feel simulated physical contact in VR is an area Sarah is researching as part of her PhD work. This is the topic of her 2019 Hackaday Superconference talk which you’ll find embedded below.
Continue reading “In Pursuit Of Haptics For A Better VR Experience”