
Robotic arms are fascinating devices, capable of immense speed and precision when carrying out their tasks. They’re also capable of carrying great loads, and a full-sized industrial robot in operation at maximum pace is a sight to behold. However, while it’s simple to design grippers to move strong metal objects, picking up delicate or soft objects can be much harder. A team at MIT CSAIL have been working on a solution to this problem, which they call the Origami gripper.
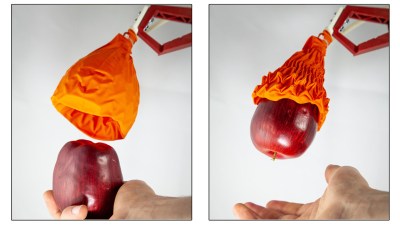
The gripper consists of a flexible, folding skeleton surrounded by an airtight skin. When vacuum is applied, the skeleton contracts around the object to be picked up. The gripper is capable of grasping objects sized up to 70% of its diameter, and over 100 times its weight.
Fabrication of the device involved the creation of 3D printed molds to produce the silicone rubber skeleton. Combined with precise lasercutting and advanced layering techniques, this created a part that can self-fold itself into shape under the right conditions. The structure was inspired by a “magic ball” origami design. The outer skin is remarkably simple in comparison – consisting of a regular latex balloon.
The team show off the gripper performing some impressive feats, with the robot able to pick up objects of all shapes, sizes, and weights without damage. The paper is available to read for the full story on the device. The use of vacuum for delicate gripping tasks is something we’ve seen before, too.














So basically ye olde coffee grounds gripper, but with origami instead of coffee grounds to give it more of a gripper shape.
Also, wow, origami-related stuff out of MIT CSAIL without Erik Demaine. Must be too applications-y for his interest.
looks like the prototype for the Dalek “sucker” manipulator is ready for testing…
Curious that the gripper must be handed things in order to operate. I suspect that the person employed to hand things to the robot will not have a great job satisfaction.
Awesome range of objects shown in that demo video, though. I smiled when it got the (Taranis?) RC remote by the handle.
I’m surprised they didn’t try eggs