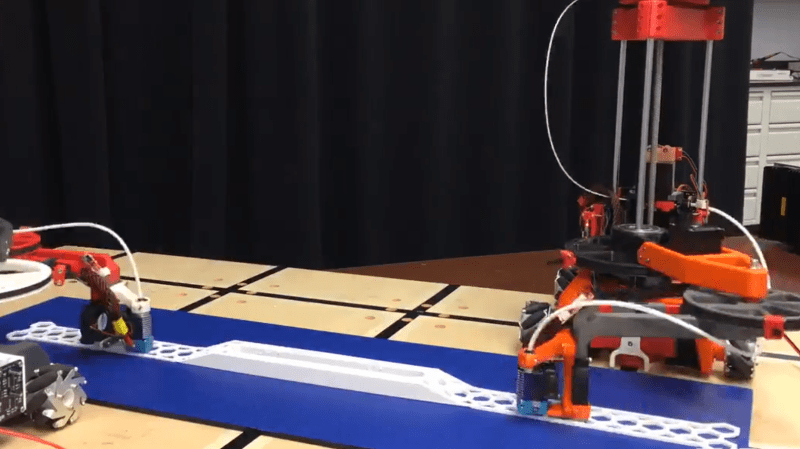
Putting a 3D printer on a mobile robotic platform is one thing, but two robots co-cooperatively printing a large object together is even more impressive. AMBOTS posted the video on Twitter and we’ve embedded it below.
The robots sport omnidirectional wheels and SCARA format arms, and appear to interact with some kind of active tabletop to aid positioning. The AMBOTS website suggests that the same ideas could be used for other tasks such as pick and place style assembly work, and the video below of co-operative 3D printing is certainly a neat proof of concept.
As a side note: most omni wheels we see (such as the ones on these robots) are of the Mecanum design but there are other designs out there you may not have heard of, such as the Liddiard omnidirectional wheel.
Check out the first cooperative #3dprint using our new mobile #Robotics #platform! pic.twitter.com/yAAL8cVDHw
— AMBOTS (@Ambots3D) March 25, 2019













This isn’t quite as mesmerizing as watching to Falcon rockets land in sync, but it’s darn close!
> By playing this video you agree to Twitter’s use of cookies
> This use may include analytics, personalization, and ads.
Is this really necessary?
:-(
the robot overlords want their data…
Nope. You could choose not the play the video.
i’m waiting for the day that a driveup will require me to agree to terms like that to get food.
We live in the lamest dystopia.
that is very cool – Id love it if my 3d printer looked that cool maybe my next 3d printer build shou,d be a SCARA style one.
Stop hanging out on Youtube or the next article will be titled “DO THIS SIMPLE TRICK AND SEE WHAT HAPPENS (AMAZING ON ANOTHER LEVEL)”.
Is it just me or did the orange one never move?
its just you, or your browser.
While the design is interesting the desire in clicking o this was to see both robots dynamically overlapping each other’s printing as they work. As it stands there’s no difference between this and two separate printers printing on different tables
I believe I accidentally bumped the report comment on this. Please disregard.
Well I agree with what you’re saying, I would also say that something like this has far more potential then standard dual printers on Separate Tables. I’ve been very interested and using a 3D printer to make molds to be used in carbon fiber layup 4 car parts, and this is the first printer that I’ve seen that I think could actually be utilized for something like that. There is so much these machines could be used for that I am happy for the article, even if they are non-overlapping during their printing.
Or one big bed dual head printer. Also the orange unit never moved, it just did a standard set of x,y,z moves with it’s head.
So you watched the first 10 seconds. Good job.
The video never shows the robot finish printing on one location, move to the other location and resume printing on one continous take. So it is higly possible that the concept is not actually implemented. Instead the robots are most likely manually relocated and readjusted between the frames. Still the good enough demonstration of the idea, and it is actually implementable, once the positioning accuracy and robots cooperation algorithms are solved.
It looks like it was implemented in software before they even tried it in hardware.
https://twitter.com/i/status/1018171492113289216
https://3dprintingindustry.com/news/the-chunker-chunk-based-slicer-proposed-for-cobot-3d-printing-141602/