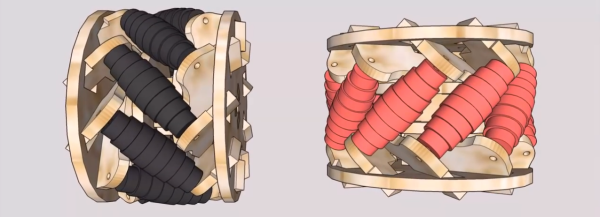
Mecanum wheels are popular choices for everything from robots to baggage handling equipment in airports. Depending on their direction of rotation, they can generate forces in any planar direction, providing for great maneuverability. [ATOM] set about building just such a robot chassis, and learned plenty in the process.
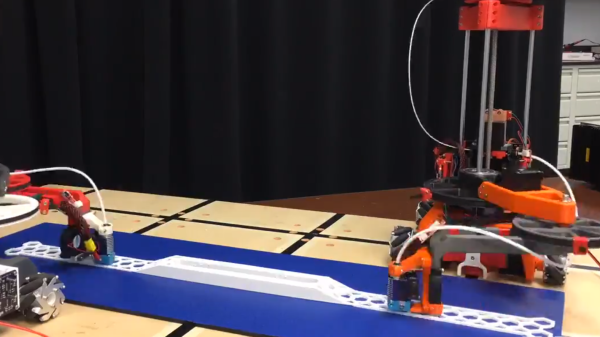
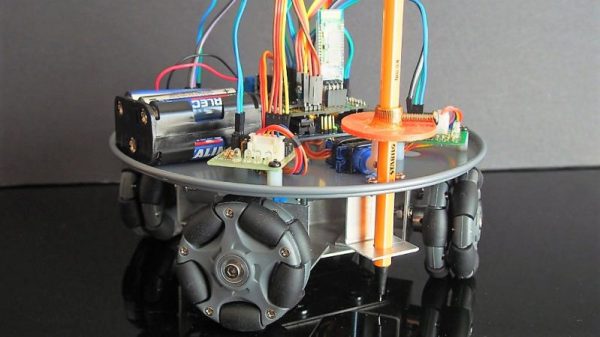
The design is similar to those we’ve seen in the past. The robot has four mecanum wheels, each driven by its own motor. Depending on the direction of rotation of the various wheels, the robot can move forward, backwards, and even strafe left and right. Plus, it can effectively tank turn without excessive slippage thanks to the rollers on each wheel. An ESP32 serves as the brains of the ‘bot, allowing it to be readily remote controlled via a PS4 gamepad over Bluetooth.
If you’re looking to build a small robot chassis that’s great at moving about in tight, small spaces, this could be a great project to learn with. All the necessary parts are relatively easily available, and the PCB files can be had on GitHub.
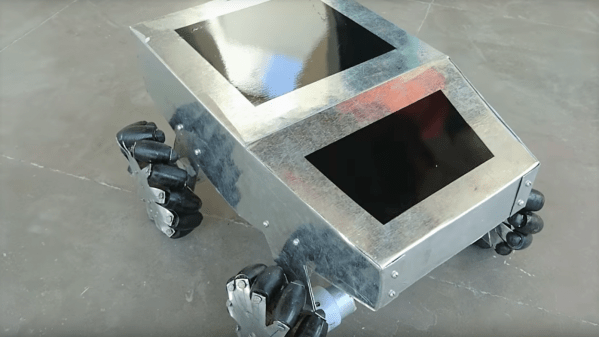
If you like the idea of mecanum wheels but need something bigger, consider starting with a set of hoverboard wheel motors. Continue reading “Mecanum-Wheeled Robot Chassis Takes Commands From PS4 Controller”