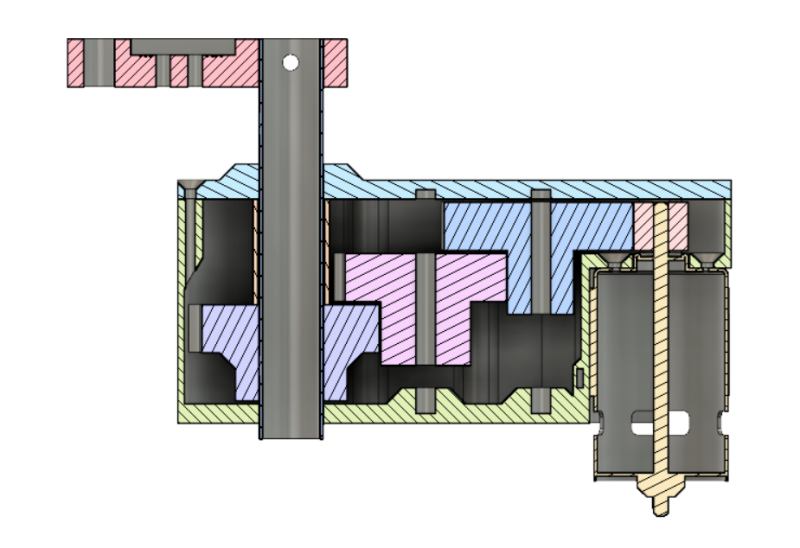
This servo/gear reduction was assembled with almost all 3D-printed parts. Apart from a brushed 36 V DC-motor, a stainless steel shaft, and screws for holding the servo together, the only other non-printed part is the BTS7960B motor driver.

Some interesting stats about the plastic servo – its stall torque is about 55 kg/cm, reaching a peak current draw of 18 A when using a 6s LiPo battery outputting 22-24 V. The shaft rotates using two 20 mm holes and lubrication. (Ball bearings were originally in the design, but they didn’t arrive on time for the assembly.)
The holes of the gears are 6.2 mm in diameter in order to fit around the shaft, although some care is taken to sand or fill the opening depending on the quality of the 3D print.
This isn’t [Brian Brocken]’s only attempt at 3D-printing gears. He’s also built several crawling robots, a turntable, and a wind up car made entirely from acrylic. The .stl files for the project are all available online for anyone looking to make their own 3D-printed servo gears.

















This is super interesting, but have you heard of a guy named Bill Masters? I recently read an article on OZY about how Masters developed the first 3D printing patent – then lost it. Anyone know anything about this? Here it is for reference: http://www.ozy.com/flashback/and-he-could-have-been-the-father-of-3d-printing/81198#.WeXu6REalHI.twitter
As far as I can tell, that’s not a servo yet, but just a motor with a gearbox.
Yea, I second that. This is not technically a servo, there’s no feedback or logic. It’s a very nicely built gear motor. If he converts it to serve, I’d be highly interested in building one myself.
Yes this is definitely not a servo. It is a gearboxes dc motor. Heh, if only some gearing was all you needed to build a servo. I am working on an actual servo using 3d printing, will hopefully get it featured on here once I get it all good and published
Adding an AMS magnetic rotation sensor would be easy to do on the output shaft. Doing so, and providing the control logic would make it into a nice servo. Then the usual issues like backlash and acceleration limits would take some time – but this is a very nice start. Keep up the good work!