The microcontrollers are cheap, the sensors are cheap, even the motors are cheap. So why are all the good wheeled robotics platforms so expensive? [Dimitris Platis] wanted to develop an affordable platform for experimenting with rovers, but the cheap plastic chassis he was using gave him all sorts of problems. So he did what any good hacker would do, and built a better version himself.
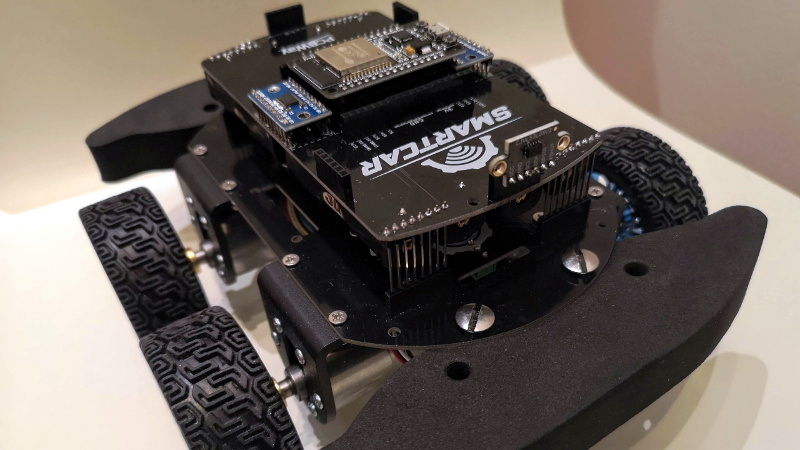
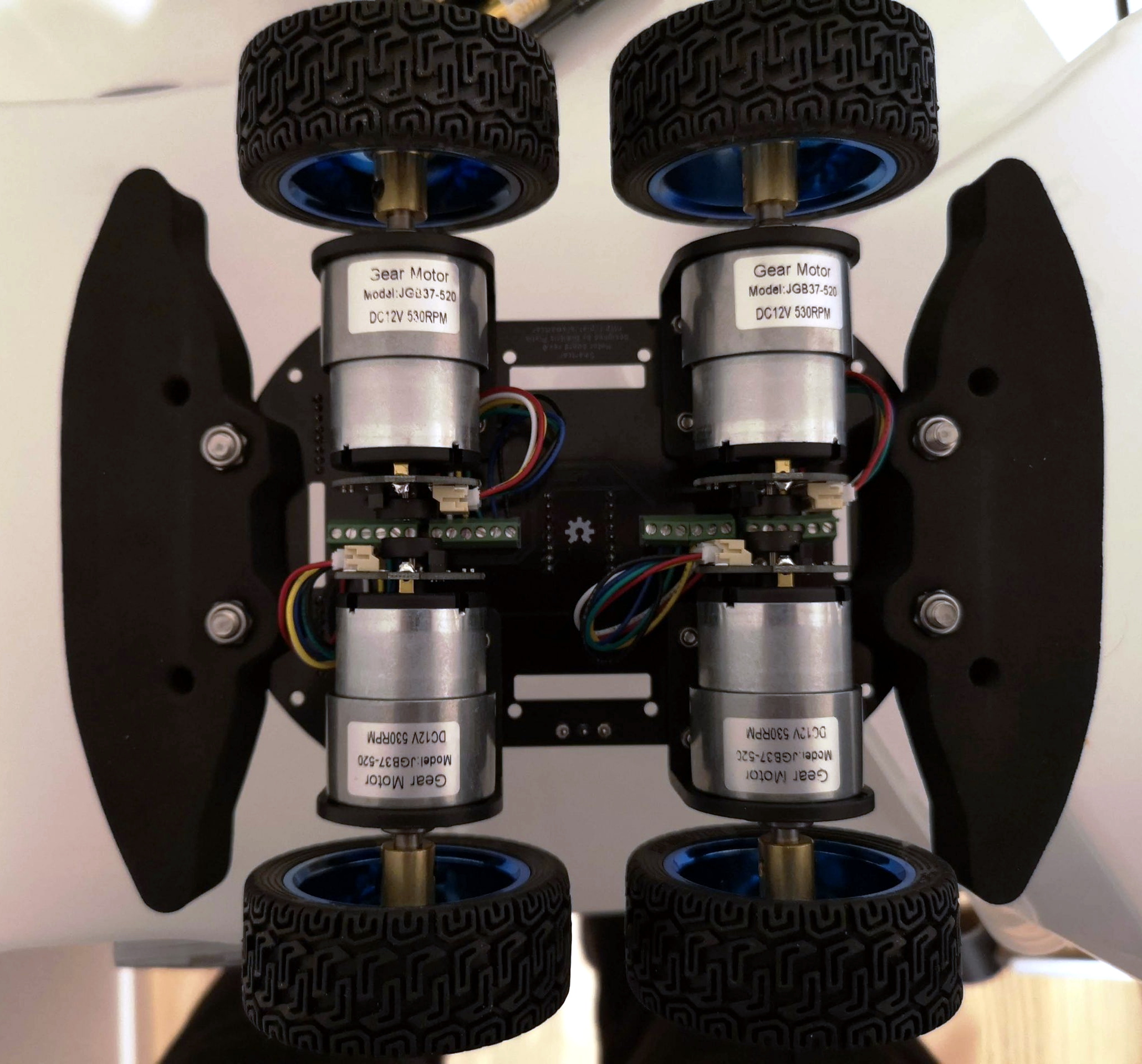
Interestingly, [Dimitris] decided to go with a chassis made from two PCB panels. The motors, mounted to small angled brackets, bolt directly to the lower PCB. These aren’t your standard $2 DC cans either. Each JGB37-520 gearhead motor comes complete with an encoder that allows your software to determine speed, distance, and direction. The upper PCB connects to the lower with several rows of pin headers, and plays host to whatever electronics payload you might be experimenting with at the time.
 For the controller, [Dimitris] says the ESP32 is hard to beat by pretty much any metric you want to use. With integrated wireless and considerable computational power, there’s plenty of options for controlling your little rover either remotely or autonomously. But he also says that every effort has been made to ensure that you could switch out the microcontroller with something else should you want to spin up a customized version.
For the controller, [Dimitris] says the ESP32 is hard to beat by pretty much any metric you want to use. With integrated wireless and considerable computational power, there’s plenty of options for controlling your little rover either remotely or autonomously. But he also says that every effort has been made to ensure that you could switch out the microcontroller with something else should you want to spin up a customized version.
The whole idea reminds us a bit of quadcopters we’ve seen in the past, where the PCB wasn’t just being used structurally as a place to bolt the motors and hardware to, but actually contained functional traces and components that reduced how much wiring you needed to do. Naturally, this means that any damage to the chassis might cripple the electronics, but presumably, that’s what the big foam bumpers are there for.
[Dimitris] designed this project for educational use, so he assumes you’ll want to build 10 or 12 of these for your whole classroom. In those quantities, he says each bot will cost around $60. If you wanted to reduce the price a bit more, he says swapping the motors would be your best bet as they’re the single most expensive component of the design. That said, $60 for a quality open source rover platform sounds pretty fair to us.
Still too much? You could check out one of the 3D printable rover designs we’ve covered over the years. Or see if you can get lucky and pick up a cheap robot from the clearance rack and hack it.














what about the steering ?
steering by 2 motors requires 2 wheels from the second (not powered) axis to turn left right freely, to not generate stress to tyres
steering by 4 motors is fit for slowly moving vehicles only and you need larger distance between the axes to limit the turning angle
jack
manta103g at gmail
>Each gearhead motor comes complete with an encoder that allows your software to determine speed, distance, and direction
Presuming that you have fast enough control over the motors you should be able to simulate something like a differential entirely in software, reducing the speed of the motors on the inside of the turn based on what an actual differential would do.
Of course you can leave those motors unpowered, think of it like selectable 4 wheel drive.
ok, in theory you are right
“Presuming that you have fast enough control over the motors you should be able to simulate something like a differential entirely in software, reducing the speed of the motors on the inside of the turn based on what an actual differential would do.
but in this project you need to simulate 2 differentials, for 1.axis and for 2.axis separately, making control more difficult and processor’s power heavy.
But this rover is not claimed to be built to simulate differential at all, so removing 2 motors makes sense, as I suggested earlier.
cool project, nice concept.
But there is one thing that I don’t understand… it needs to be cheap but it uses 4 motors? Why not 2, that’s all you need.
Considering that geared motors WITH encoders aren’t cheap (although they are a lot cheaper then I expected), it adds up to a significant part of the bill of materials.
technically you only need to power one wheel if you have steer with two. but that means a servo instead of a motor. but the servo can be a lot less robust (and cheaper).
I used to have an RC car that was 1 channel. It could go forward or reverse, if it went reverse a little mechanism would turn the steering so you always turned in reverse.
Obviously so you can saw them in half and bolt 6″ of 2×4 and a caster on each piece when your funding request for 1 per student gets chopped to one per 2 students.
Spoken like a teacher with some funding experience.
Casters in the front, two motors in the rear, like a zero turn mower. Dont need an encoder if its manintheloop.
An AWD bot
Developing RC rover look at Electric Powered Wheelchair on the internet first.
Never install 4 motors since it doesn’t make any sense if both axes are mounted so close.
Visit diydrones one day to lean more on how to build a smart rover.
Visit RC wheelchair projects, for smart RC rover development.
My 2c on the 4 wheel drive (4WD).
I have build and used 2WD cars similar to this before with a caster as third wheel. also for education purpose.
Admittingly it was with cheap dc motors no encoder. But here we often saw that the caster (also cheap) required some force to rotate (not roll), resulting in that if you just did a turn and then wanted to go straight the caster would cause the car to drag towards on direction, making the car run in a big arch instead of a straight line.
So if you go for the 2WD, either make sure to get stronger motors (and then also bigger batteries a.s.o.) or maybe use a ball caster.
I asked Dimitris about the 4WD, as I had some concern similar to the ones expressed by @jan and @dj here. And Dimitris told me that 4WD was easier to drive, he had seen the same caster dragging problem as me with 2WD, no issues on 4WD.
I am yet to test the 4WD, but i assume that the low distance between axes and the light weight of the car, compensated for the fact that the wheels will skip a little when turning, as the axes is fixed paralel. So unless you need millimeter accurate steering it can be controlled as a 2WD.
Working on an update for this concept here if anyone wants to help out.
Adding user-selectable Microcontroller, LifePO4 & an optional SBC