
For moving about in the real world, robots can crawl along the ground or take to the sky. Both options have disadvantages, with obstacles being a problem on the ground and flying being very energy intensive. What we don’t often see are robots that move along aerial cables, which can offer the best of both worlds for certain use cases. Taking inspiration from a sloth’s slow and efficient movement through the trees, researchers from Georgia Tech created a robot to crawl slowly along a cable network and monitor the world around it, and of course named it Slothbot.
Slothbot trades speed for efficiency, letting it operate for very long periods on solar power alone. It does require the set up and maintenance of a cable network, but that brings the advantage of no obstacles, and the ability to stop and recharge. To us the most interesting feature is the cable switching mechanism, that allows it to navigate its way along a web of interconnected cables.
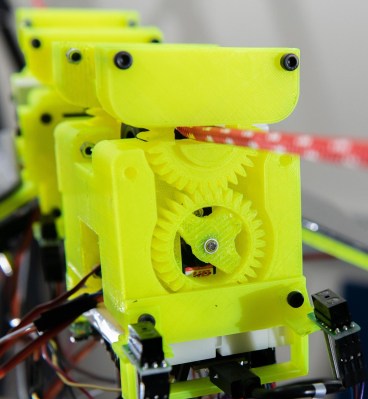
Ring gears with a section removed hold the upper part of the pulley mechanism, but can rotate it’s opening to the left or right to allow an interconnecting cable to pass through, The body is in two pieces, with an actuated hinge in the middle to allow it to turn onto a different cable section. Each section of the body also has a powered wheel which pushes up against the cable and moves the robot along slowly. Not surprisingly, researchers say that making the cable switching mechanism reliable is the biggest challenge. It does look like the current design would not work well with thicker cable joints. Watch the video after the break for a better look at the mechanism
Slothbot has been deployed to the Atlanta Botanical Gardens for testing, although judging by the extra pulleys for the shell, it won’t be doing any cable switching. We can think of a number of use cases for this type of robot, like monitoring orchards or warehouse stock. Drop some more ideas in the comments below!
We saw a similar slow-but-steady approach on [rctestflight]’s solar rover, but it had a bit more trouble with obstacles. For another type of robotic sloth, take a look at this cool but slightly creepy climber.
Thanks [Qes] for the tip!














That is quite neat. Though i expect it will have rather heavy wear issues around that change mechanism and eating bits of plant is bound to gum it up sometimes.
I like it. There is plenty of space to beef-up some parts if wear or strength becomes an issue, without any changes to the principal solution at all. No need to switch to other materials, just beef-up the details that fail and watch the print orientation.
Haha super cute robot! I’ve thought of doing something similar, but for each cable roller mechanism I was thinking of using a set of 3 or 4 relatively large spools with sort of an hourglass / “torus hole” profile, such that the lower wheel(s) could move away from the other 2 to let a cable in, and when they move together again the edges of the spools could get very close to each other to keep the cable from slipping out. Some sort of suspension in the lower wheel(s) would allow for smooth rolling over joins and knots.
very cute, if he wants he can hang in my room too :)
People have suggested using cable cars as urban transport, but you can’t switch them, maybe this could help. (And as for the sloth like speed, well if you’ve ever rode the Red Rocket a sloth would be an upgrade!)