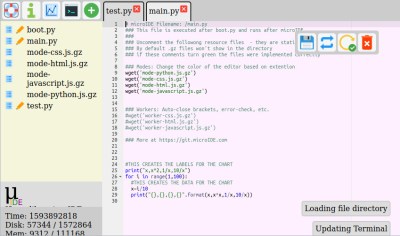
What if your microcontroller IDE was running on the microcontroller itself and not hosted on the computer you use to do the programming? The greatest legacy of Arduino in all its forms has arguably been a software one, in that it replaced annoying proprietary development environments with one that installed easily on a range of operating systems, was easy to use, and above all, worked. The next level of portability is to get rid of any specialize computer-side software. [Ronny Neufeld] wrote MicroIDE for ESP32 as an IDE accessible through a web browser, which interestingly is hosted on the target device itself.
Using the IDE is easy enough, install a binary, connect to the ESP with a web browser, start writing MicroPython code. There is a choice of connecting directly to the chip as a hotspot, or connecting via another WiFi network. The interface is looking pretty slick but he’s at pains to remind us that it’s a work in progress. Sadly there is no source code yet as it’s a binary distribution that is free for non-commercial use, we’d hope that an open-source release might one day happen. It’s not for everyone, but the convenience of accessing the same interface from almost any modern device should help attract a healthy community.
This appears to be the first web-based on-chip ESP IDE we’ve shown you. But it’s not the first on-chip coding example, as this BASIC interpreter shows.
If you’re a frequent traveler on a public transit system, it can be helpful to know when the trains or buses are arriving and if there are any delays. We might reach for a tablet to mount on the wall, but that relies on keeping the OS, the software, and its library dependancies up to date. For true reliability you’ll need to build directly in hardware, which is exactly what this map of the London tube system uses.
The base map is printed directly on PCB, with LEDs along each of the major routes to indicate the current location of the trains. A few small chips handle the WiFi connection — it appears to our eye to be an ESP8266 — and pulling the information about the trains from the London Underground API (it would be virtually impossible to build everything for this project in hardware). The hardware can be easily reprogrammed, and with the PCB layout this could be adapted for other public transit fairly easily.
Even apart from the philosophical differences on design between hardware and software approaches, we still appreciate the aesthetic of LEDs on PCB. In fact, we’ve seen a whole host of artwork on PCBs ever since the price came down dramatically in the past two decades.
Remember all the hubbub over Betelgeuse back in February? For that matter, do you even remember February? If you do, you might recall that the red giant in Orion was steadily dimming, which some took as a portent of an impending supernova. That obviously didn’t happen, but we now seem to have an explanation for the periodic dimming: an enormous dark spot on the star. “Enormous” doesn’t begin to describe this thing, which covers 70% of the face of a star that would extend past Jupiter if it replaced the sun. The dimming was originally thought to be dust being blown off the star as it goes through its death throes, but no evidence could be found for that, while direct observations in the terahertz range showed what amounted to a reduction in surface temperature caused by the enormous star spot. We just think it’s incredibly cool that Betelgeuse is so big that we can actually observe it as a disk rather than a pinpoint of light. At least for now.
F-15c cockpitF-15a cockpit
If you think you’ve seen some challenging user interfaces, wait till you get a load of the cockpit of an F-15C Eagle. As part of a new series on human interfaces, Ars Technica invited Col. Andrea Themely (USAF-ret.) to give a tour of the fighter she has over 1,100 hours on. Bearing in mind that the Eagle entered service in 1976 and has been continually updated with the latest avionics — compare the video with the steam gauges of the cockpit of an F-15A — its cockpit is still a pretty busy place. As much as possible has been done to reduce pilot load, with controls being grouped by function and the use of color-coding — don’t touch the yellow and black stuff! — and the use of tactile feedback. It’s a fascinating deep dive into a workplace that few of us ever get to see, and we’re looking forward to the rest of the series.
Sad news from Seattle, where the Living Computers: Museum + Labs is closing up shop. The announcement only says they’re closing “for now”, so there’s at least some hope that the museum will be back once the COVID-19 downturn has run its course. We hope they do bounce back; it really was a great museum with a lot of amazing hardware on display. The Vintage Computer Festival PNW was held there in its inaugural year, an event we covered and had high hopes for in the future. We hope for the best for these educational and cultural institutions, but we can’t help but fear a little for their future.
So you suffer a partial amputation of your left hand, leaving you with only your thumb and your palm. That raises an interesting conundrum: you haven’t lost enough to replace the hand with a prosthetic one, but you still don’t have any fingers. That appears to be what happened to Ian Davis, and so he built his own partial prosthetic to replace his fingers. There’s not much backstory on his YouTube channel, but from what we can gather he has gone through several designs, most of which are myomechanical rather than myoelectric. Through a series of complex linkages, he’s able to control not only the opening and closing of the fingers, but also to splay them apart. It’s all in the wrist, as it were — his input gestures all come from flexing and extending his hand relative to his forearm, where the prosthesis is anchored. This results in a pretty powerful grip — much stronger than a myoelectric hand in a head-to-head test. And the coolness factor of his work is just off the scale. We’re looking forward to more from Ian, and hopefully enough background information for a full story on what he has accomplished.
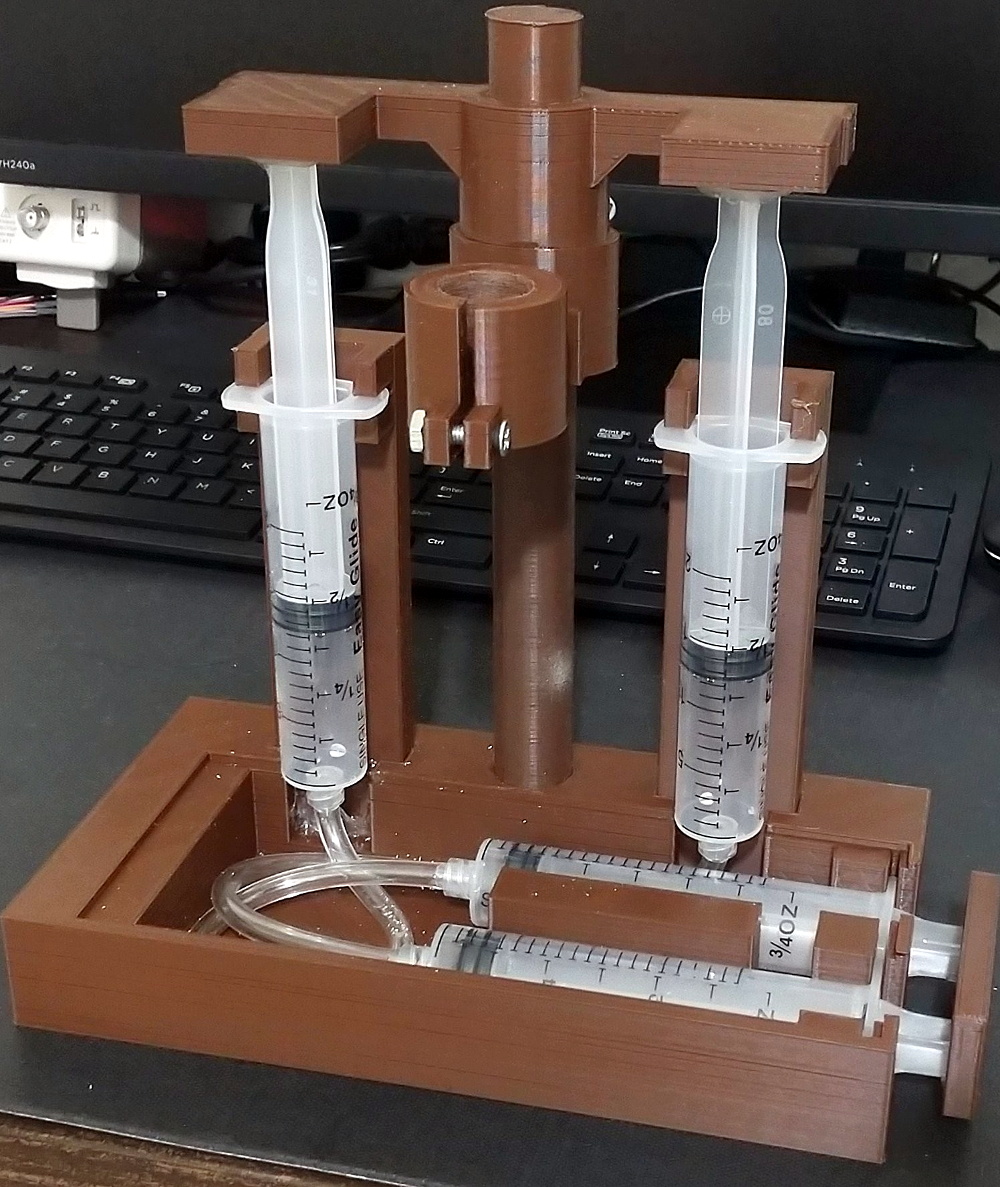
If you’re making your own PCBs for through-hole projects at home, getting the board etched is only half the battle; you’ve still got to drill all those little holes. It’s a tedious process, and if you’ve got a lot of them, doing them freehand with a drill just isn’t going to cut it. Which is why [Ruchir Chauhan] built this tiny 3D printed drill press.
This design is actually interesting for a number of reasons. The fact that it’s primarily 3D printed is a big one, though of course it’s not the first time we’ve seen that. We also like the minimal part count and low-cost, which is sure to appeal to those looking to produce PCBs on a budget. But the most impressive feature has to the hydraulic system [Ruchir] has come up with to actually do the drilling.
Rather than pulling an arm to lower the bit towards the work piece, a system utilizing four syringes, some water, and a bit of tubing is used to pull the tool down. This might seem extravagant, but if you’ve got a lot of holes to drill, this design is really going to save your arms. This method should also give you more consistent and accurate results, as you won’t be putting any torque on the structure as you would with a manually operated press.
[Ruchir] doesn’t offer much in the way of instructions on the project’s Hackaday.io page, but once you print out all of the provided STLs and get your syringes ready to go, the rest should be fairly self explanatory. Personally we might have added a smooth steel rod in there to make sure the movement is nice and straight, but we can see the appeal of doing it with a printed part to keep things cheap.
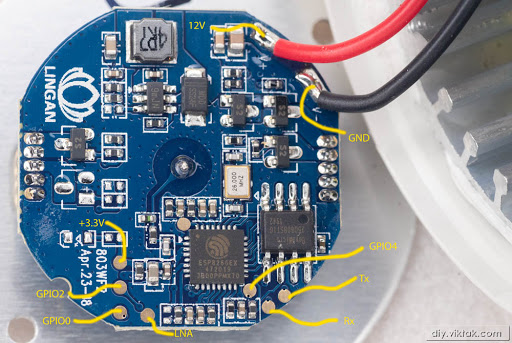
There are some incredibly cheap WiFi smart bulbs on the market these days, but as is often the case, you tend to get what you pay for. When [Viktor] took delivery of his latest bargain basement bulb, the thing didn’t even work. So much for Quality Assurance. On the plus side, it was a great excuse to pop it open and replace the firmware.
For anyone wondering, [Viktor] never actually figured out why the bulb didn’t work. Its ESP8266-based control board was getting power, and data was getting spit out of the serial port when he connected it to the computer (although he never got the communications settings right to actually see what it was saying). But he also didn’t care much; once he confirmed that the hardware was good, he just uploaded the custom firmware he’d previously developed for another ESP8266 bulb.
Of course, it wasn’t quite that easy. The chances that both bulbs would have used the same GPIO pins to control the red, green, blue, and white LEDs were pretty slim. But after some testing and modifications to the code, he was able to fire them up. The other issue was a bit trickier, as it turned out the bulb’s flash chip was too small to hold his firmware’s web configuration pages. So he had to break out the hot air gun and replace the SPI flash chip with something a bit roomier. We suppose he could have just made smaller web pages… but where’s the fun in that?
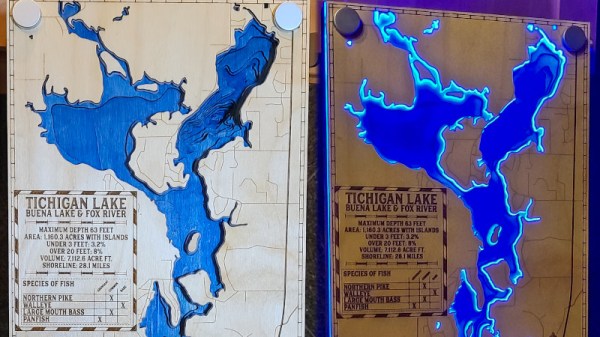
A bathymetric map is one concerning the floor or bottom of a body of water. It’s the wet equivalent of a topographical map. Combine this with humanity’s inherent taste in seaside real estate, and they can be quite attractive when done correctly. We’d say this effort from [pubultrastar] hits the mark.
Created as a commission piece, the subject of the map is Tichigan Lake in Wisconsin, USA. Made on a Glowforge laser cutter, the design is built of layers of lasercut wood stacked up to represent the natural contours of the bottom of the lake. There’s also a layer of acrylic included, to which special standoffs are fitted. These standoffs hide blue LEDs inside, which allow the acrylic to be edge lit without the LEDs themselves being visible.
The final effect is impressive, with the blue water contrasting artfully with the laser-engraved wood front panel when the lights are turned on. It’s an excellent conversation piece, particularly for those with a waterfaring bent. It’s not the first bathymetric map we’ve featured, either, with this book serving as a particularly stunning example.
For moving about in the real world, robots can crawl along the ground or take to the sky. Both options have disadvantages, with obstacles being a problem on the ground and flying being very energy intensive. What we don’t often see are robots that move along aerial cables, which can offer the best of both worlds for certain use cases. Taking inspiration from a sloth’s slow and efficient movement through the trees, researchers from Georgia Tech created a robot to crawl slowly along a cable network and monitor the world around it, and of course named it Slothbot.
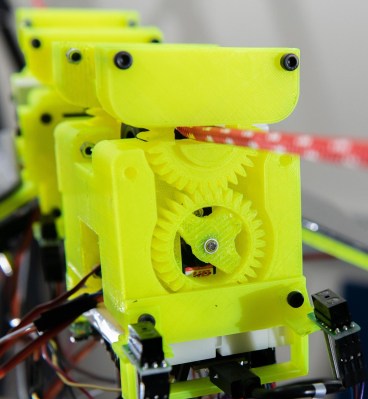
The cable switching mechanism
Slothbot trades speed for efficiency, letting it operate for very long periods on solar power alone. It does require the set up and maintenance of a cable network, but that brings the advantage of no obstacles, and the ability to stop and recharge. To us the most interesting feature is the cable switching mechanism, that allows it to navigate its way along a web of interconnected cables.
Ring gears with a section removed hold the upper part of the pulley mechanism, but can rotate it’s opening to the left or right to allow an interconnecting cable to pass through, The body is in two pieces, with an actuated hinge in the middle to allow it to turn onto a different cable section. Each section of the body also has a powered wheel which pushes up against the cable and moves the robot along slowly. Not surprisingly, researchers say that making the cable switching mechanism reliable is the biggest challenge. It does look like the current design would not work well with thicker cable joints. Watch the video after the break for a better look at the mechanism Continue reading “Slothbot Lives Up To Its Name”→

 Using the IDE is easy enough, install a binary, connect to the ESP with a web browser, start writing MicroPython code. There is a choice of connecting directly to the chip as a hotspot, or connecting via another WiFi network. The interface is looking pretty slick but he’s at pains to remind us that it’s a work in progress. Sadly there is no source code yet as it’s a binary distribution that is free for non-commercial use, we’d hope that an open-source release might one day happen. It’s not for everyone, but the convenience of accessing the same interface from almost any modern device should help attract a healthy community.
Using the IDE is easy enough, install a binary, connect to the ESP with a web browser, start writing MicroPython code. There is a choice of connecting directly to the chip as a hotspot, or connecting via another WiFi network. The interface is looking pretty slick but he’s at pains to remind us that it’s a work in progress. Sadly there is no source code yet as it’s a binary distribution that is free for non-commercial use, we’d hope that an open-source release might one day happen. It’s not for everyone, but the convenience of accessing the same interface from almost any modern device should help attract a healthy community.