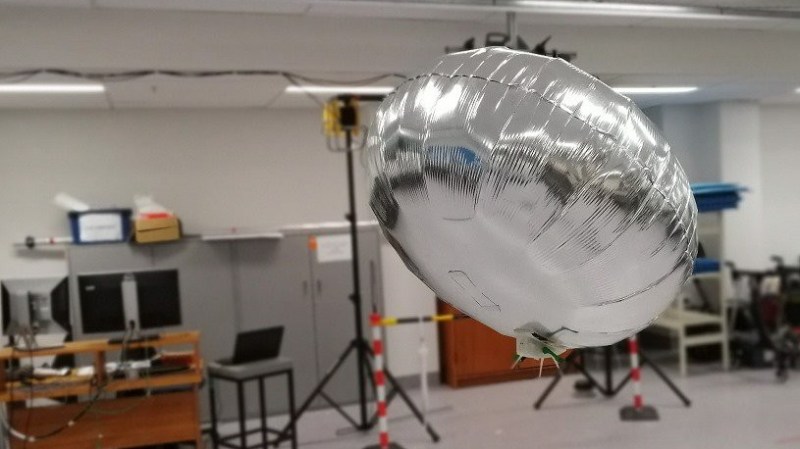
It’s not a balloon, however shiny its exterior may seem. This miniature indoor robotic airship created by the University of Auckland mechanical engineering research group [New Dexterity] is an asymmetric system experimenting with the possibilities of an open-source helium-based airship.
Why a helium airship, as opposed to a fixed wing aircraft? The group wanted to experiment with the advantages of lighter-than-air (LTA) travel, namely the higher mobility and looser path planning constraints. Furthermore, LTA airships have a less obstructed field of vision and fewer locomotion issues. While unmanned aerial vehicles (UAV) may be capable of hovering in one place, their lift is generated by rotor thrust, which drains their batteries quickly in the order of minutes. LTA airships can hover for longer periods of time.
The design was created for educational and research purposes, focusing on the financial feasibility of manufacturing the platform, the environmental impact of the materials, and the helium loss through the balloon-like envelope. By measuring these parameters, the researchers are able to study the effects of circumstances such as the cost of indoor commercial balloons and the mechanical properties of balloon materials.
The airship gondola was designed and 3D printed in a modular fashion, then attached to the envelope with Velcro. The placement with respect to the horizontal symmetry of the gondola was done for flight stability, with several configurations tested for the side rotor angle.
The group open-sourced their CAD files and ROS interface for controlling the airship. They primarily use off-the-shelf components such as Raspberry Pi boards, propellers, a DC single brushed motor driver carrier, and LiPo batteries for a total cost of $90 for the platform, with an addition $20 for the balloon and initial helium filling. The price is comparable to the cost of indoor blimps like the Blimpduino 2.0.
You can check out the completed airship below, where the team demonstrates its path following capabilities based on a carrot chasing path finding algorithm. And if you’re interested in learning more about the gotchas of building lighter-than-air vehicles, check out [Sophi Kravitz’s] blimp talk from Hackaday Belgrade.

















oh the humanity!!! too soon?
Should fit it with blimpen lights!
I had an RC blimp back in the early ‘aughts. Lots of fun when there’s an aircon intake vent in the room – even if it seems like the air is perfectly still the blimp will still head straight for the intake and get stuck…
“A balloon is a flexible bag that can be inflated with a gas, such as helium…” – from Wikipedia. While I get that it isn’t a store bought party balloon, I’m pretty sure it’s still a balloon.
Airships are just balloons that can navigate through the air under their own power.
Why don’t they use hydrogen in similar setups? Is it really so dangerous? I image a flash from a pure hydrogen blimp would barely burn off you arm hair even if you were holding the blimp.
If it goes boom while hovering next to your ears say goodbye to your eardrums.
I wonder if there is an additive that can be added to the hydrogen to make it less explosive but still viable for use in these applications.
I think that any additive would also add greatly to the weight of the gas, which would negate the advantages of using hydrogen.
What about using Helium as an additive?
I hear there’s a version with a few extra protons and electrons that’s *way* less explosive.
The reaction to make it from Hydrogen is pretty exothermic.
“I wonder if there is an additive that can be added to the hydrogen to make it less explosive but still viable for use in these applications.”
Oxygen’s pretty good but steam doesn’t have much lift, particularly as it cools and condenses.
Hydrogen just isn’t that energetic. On the other hand, a nice oxygen-acetylene mix will rattle windows on both sides of the street. Of course it has no lift.
I used to fill PET bottles with pure oxygen and acetone or other flamable hydrocarbons and pop them for fun. Legend (and my friends) say that I managed to crack one window though I’ve always tought it had already been cracked before :D
I’ve also tried hydrogen and oxygen but never tried hydrogen + air moreover badly mixed ones (separated by baloon wall).
that is in the case of a perfect oxygen-hydrogen mixture, here we are talking about just hydrogen mixing slow with air… the only thing you can have is a flame of few seconds, in order to happen it needs to fly over a flame enough time to make a hole and ignite.
If air starts to mix with the hydrogen inside, then you would notice that super fast because the whole buoyancy changes a lot.
Hydrogen balloons aren’t nearly as bad as they are made out to be, though inside it might get too close to other flammable objects while still burning.
… and you might grow tougher eyes after you’ve had boiling water splashed into them a few times.
I don’t get the obstructed vision being called out as a deficit of fixed wing UAVs when the gas bag on an airship visually obstructs most of a whole hemisphere. Particularly when cameras are so small now that sticking them in wing tips and tail mean that you CAN get complete coverage in a fixed wing.
I would also be curious to see a real world test of the claims with regards to hovering. What exactly is their definition of hovering? It wouldn’t take much of a draft/air current to blow that thing off its mark. So the system would need to constantly compensate to keep it in one location, much like a multi-rotor drone. Considering the motor arrangement, Is it even possible for that thing to hover in a single spot without rotating in circles?
Airships can’t hover without burning fuel also. They tend to get blown all over the place.
If you look at the attempt at a circular trajectory, it’s pretty much a “turns about a point” exercise that pilots do and you can rough in the air currents that produced it.
https://www.faa.gov/regulations_policies/handbooks_manuals/aviation/airplane_handbook/media/08_afh_ch6.pdf
It’s a bit confusing that it’s referred to as an “airship”, while the other “indoor blimps” mentioned are not. As far as I can tell it meets all the definitions of a blimp, since it uses the same sort of mylar balloon that the BlimpDuino & co use, making it a non-rigid indoor airship (just like the others).
It’s a clever and well-build design regardless.
Technically blimps are tethered. But we’re past all that nonsense of words meaning actual things now.
I thought that was an aerostat.
There is other method of controlling the displacement, which doesn’t require a rotor blowing in vertical direction. There can be a second, internal baloon inside the one filled with helium. When air is pumped inside the internal baloon, the whole blimp becomes heavier while not changing it’s volume, so it goes down. When air is released, it’s lighter than air again (if baloon is big enough compared to gondole’s weight) and goes up. I think it uses less power – it’s needed only to change the displacement. You need an air pump and a valve (normally closed) – these parts can be found i.e. in a broken blood pressure meter.
I think Discovery had a special called “Alien Planet” where robotic blimps were sent to explore another planet. If I remembered correctly, they used hydrogen for the lifting gas.
Why didn’t they just buy one of these to experiment with? https://www.amazon.com/Radio-Controlled-Silver-Baboom-Flying-Blimp/dp/B00D61IK9I
Because it wouldn’t be an open-source robotic airship like the project set out to establish. Now people can build this to and expand on the software and functionality. I would love to build a couple of these things and have them autonomously fly around in the big hall of our hospital, flying back to charging docks when their batteries get low, maybe even bounce a couple of lasers off them.
Bounce lasers off a reflective mylar surface? What kind of hospital do you work at? Do they have an eye clinic that’s trying to create more business?