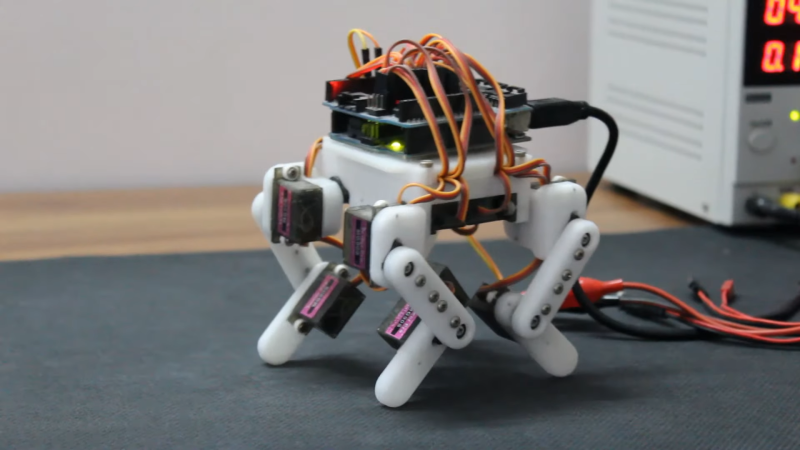
Walking robots were once the purview of major corporations spending huge dollars on research programs. Now, they’re something you can experiment with at home. [Technovation] has been doing just that with his micro quadruped build.
The build runs twelve servos – three per leg – to enable for a great range of movement for each limb. The servos are all controlled by an Arduino Uno fitted with an Arduino Sensor Shield. Everything is fitted together with a 3D printed chassis and limb segments that bolt directly on to the servo output shafts. This is a common way of building quick, easy, lightweight assemblies with servos, and it works great here. Inverse kinematics is used to calculate the required motions of each joint, and the robot can take steps from 1 to 4cm long in a variety of gaits.
We’d love to see a few sensors and a battery pack added on to allow the ‘bot to explore further in an untethered fashion. [Technovation] has left some provision to mount extra hardware, so we look forward to seeing what comes next.
We’ve seen bigger quadrupeds do great things, too. Video after the break.














Wonderful design.
Tragic that servos are still so terrible.
The whole 3D printing revolution happened because steppers and drives became simple, high-featured, cheap, pervasive.
Boosted Boards happened because of high power density RC brushless motors.
Camera gyros happened because of compact brushless motors.
Yet the jittery PWM hobby servo still persists.
Yeah, rhe fact that you can get some of that size for 2€ a piece helps.
There are serial bus servos, though I don’t think any come in the “micro” form factor yet, and they tend to be much pricier than the PWM/pot servos. With how powerful tiny little controllers are nowadays, I really don’t see how there isn’t a budget, micro option of the same yet.
https://hackaday.com/2018/07/05/wrangling-rc-servos-becoming-a-hassle-try-serial-bus-servos/
The problem is the whole servo design which just get worse the cheaper you get. The main issue is the gearing between the motor and the output shaft, any backlash or lost motion in there causes the PID loop to perform terribly since the feedback potentiometer or encoder is on the output shaft. So any lash causes a delay from motor move to feedback response which kills the responsiveness of the loop which makes servos jittery awful things.
This is as janky as I would expect it to be. Arduino – check. Cheap servos – check. 3D printed parts – check.
If you want something not janky, don’t build it with cheap crap parts. It’s really that simple.
That said, it’s still a lot of work to achieve this, I hope it was worth it.
Bagging on this project b/c of the quality of the servos? Are you crazy?
This thing has 3DOF legs, so you get to multiply your servo budget by 12 before it’s all done. $100 servos = $1,200 project. While this gets some amazing inverse kinematics done for pocket change (from 1990, adjusted for inflation).
But the really hot tip here _would_ be to spend some more time/money/attention on the motors.
This project springs to mind: https://hackaday.com/2021/03/19/robot-arm-achieves-amazing-accuracy-with-just-servos/ Turns hobby servos into plausible robotics servos, for not much money.
Mash those two projects up and you’ve got caviar on a fish-bait budget.
I’ve fix most of my problems with these servos by slightly upping the voltage and adding a capacitor. Sure, it’s still not the fix for all problems but it works.
I think you have it a bit backwards. The availability of open source 3D printers are what drove down the cost, and hence the pervasiveness, of steppers and associated electronics.
Though you’re right about the jittery hobby grade PWM servos, to an extent. What makes them jittery has less to do with the RC based PWM the use and more to do with cheap potentiometers.
That said, they’re also so incredibly cheap compared to what they used to cost. I didn’t price out the exact servos in this project, but I’d estimate you could spend between $50-100 for all 12 servos. That’s remarkable.
You can also do a lot to reduce the jitteriness. Modifying the servos so you can directly read their pots can help. You can read the position directly through software, and write code to handle the poor quality potentiometer. That can also help you bypass using RC-flavored PWM. You can drive the motor directly (using the servo’s IC) and read the positions directly as well.
All of which takes just a bit of soldering and code to make a $5.00 servo perform pretty damn well, all things considered.
Sounds cool, do you have a link to how you have made these modifications please?
I’m sure there are at least a few articles on HaD related to this mod. Adafruit also has a good tutorial:
https://learn.adafruit.com/analog-feedback-servos
Cute!
How about the similar Mini Pupper Robot Dog ROS demos(Navigation, SLAM, tracking)?
https://www.youtube.com/watch?v=OBJKSB5TkBQ
You may check out the high performance servos used on open source robot dog Bittle:
https://www.youtube.com/watch?v=FRE-sp05ia8
Users have DIY’ed their own quadruped with OpenCat quadruped framework: https://www.petoi.com/pages/3d-printed-robot-dog-robot-cat