As anyone who’s spent Christmas morning trying to shake a quadcopter out of a tree can attest, controlling these fast moving RC vehicles can be tricky and require a bit of practice to master. [Erik] wanted to simplify this a little bit so his children and friends could race with him, and the end result is a drone that only needs two inputs to fly.
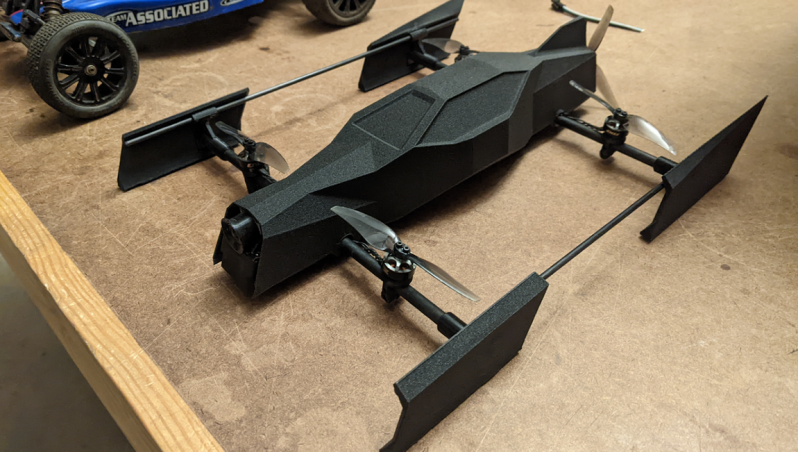
The results of his experimentation with simplifying the controls resulted in a “speeder” type drone which attempts to keep a certain distance off of the ground on its own thanks to an extremely fast time-of-flight sensor. The pilot is then left to control the throttle and the steering only, meaning that [Erik] can use pistol-style RC controllers for these machines. They have some similarities to a quadcopter, but since they need to stay level in flight they also have a fifth propeller on the back, similar to an airboat. This allows for a totally separate thrust control than would normally be available on a quadcopter.
The resulting vehicle is immediately intuitive to fly, behaving more like an RC car than a quadcopter. This also required quite a bit of processing power to compute the proper roll and yaw from a single steering input, but after many prototypes the result is impressive, especially since it was also built to use FPV as a means of control. One of the videos below demonstrates this video, and looks extremely fun to fly, and we wouldn’t mind seeing a race with these types of speeders much like we saw in the past with a group of pod-racing quadrotors.














This is great! Flying cars look like so much fun. Just enough hover to keep off the ground while you just concentrate on the steering.
What a fantastic idea! I want to make one for my grandson!
This looks awesome. I would love to make one of these. Hopefully he will either share the code and specs, or sell them.
“When v1 is done and tested and if there is enough interest I’ll share the flight code, STEP files, bill of materials, STLs for 3d printed parts and DXF files for carbon fiber parts. This thing is still in the beta (or maybe even alpha) phase and my code looks like a big fat bowl of spaghetti at the moment. I would like to clean it up and feel confident about the safety features before releasing it into the wild.”
Does this article count? When I see this statements like this, I figure it will never happen. Release in iterations with a free software and free culture licenses. It is a beautiful hobby project and the internals do not need to look professional if it works. If you are really concerned about the appearance label it as incomplete or in-progress.
If the project / proof-of-concept is cool enough, someone will fix up the code for you. You just sit back and approve the pull requests.
(Not saying that isn’t work in itself, though…)
GitHub junkie.
Since I’m not coordinated with a quadcopter controller, I’d never be able to race them without something like this. It looks amazing. I can’t wait to try it out.
It’s missing an IR filter on the camera’s lens so all trees appears pinkish.
now that’s real world wipeout!
The body somehow reminds me of the old Parrot AR Drone.
“Mr. Fox,” (raspy voice) “Does it come in black?”
Amazing build!
Very impressive 👍
This is amazing
You have a product; now you just need some investors!
Or a license with Disney. Make the ‘outriggers’ out of a transparent plastic and style the centrebody as a Star Wars speeder-bike, and you’d be printing money come Christmas.
Would certainly be an upgrade to the AWFUL SW drones they put out a few years ago at Christmas. My son and I got them and while we are newbies at the drone scene they were a nightmare to control. Nothing like watching an expensive toy break every time you tried to use it.
Would love to see V1 released, it looks like a great fun project to build.
The video makes me have flashbacks to my time as a Imperial Scout Trooper.
Don’t look now, but there’s an Ewok behind you.
I instantly started hearing the music from Wipeout, i wonder what my brain is trying to tell me ;)
Nice work. Keep it up!
Now I’m thinking of a future where there are augmented reality powerup races like in Blur or through-a-target time trials like in Return Zero.
Holy potato, what an amazing idea. Want to see if I can replicate this with iNav and some sensors *runs off*