Direction-finding, or fox hunting, is a popular activity in ham radio circles where a group of people armed with radios attempt to locate a broadcasting source. Besides being a hobby for amateurs, it’s also a necessary tool in the belt of regulators who are attempting to track down violators of the air space. There are a lot of ways to figure out the precise location of a radio transmission, but this one manages to pull it off using both a boat and a Steam Deck, each armed with a software-defined radio.
This project comes to us from [Aaron] who is well known in the amateur radio circles for his SDR-focused Linux distribution called DragonOS; which has all the tools needed for a quality SDR experience, in this case KrakenSDR and DF Aggregator. He’s loaded everything up on a Steam Deck and left that in a secure location on the shore of a lake, while he carries second device with the same software with him on a boat. With the two devices listening for a specific signal, he’s able to quickly zero in on his friend on the shore who is broadcasting on the 70 cm band thanks to the help of all of these software packages.
While ham radio isn’t always known for being a youthful and exciting activity, the advent of software-defined radio and other digital modes seem to be shaking things up in that world. Certainly speeding around a lake on a boat is fun on its own as well, and a fox hunt like this can be done with something as small and simple as a Raspberry Pi too.














I am watching the video, but wondering how it works and what exactly I am looking at.
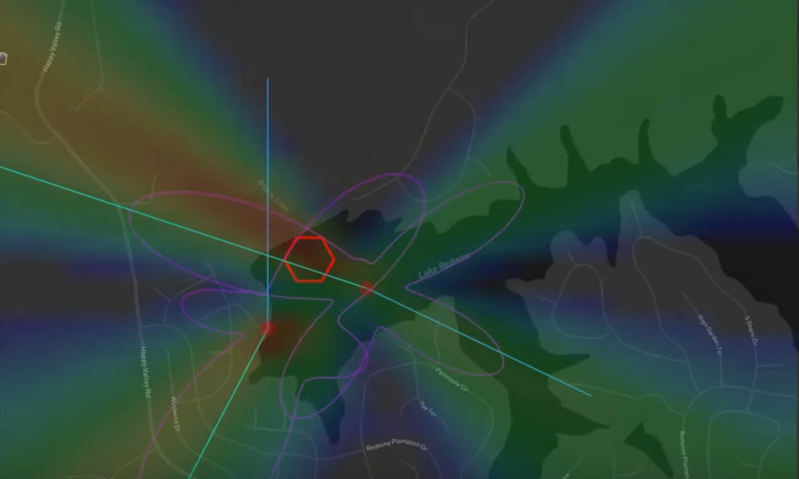
What are the constantly moving lines (which for a brief time seem to converge towards the target)?
And how doe it work? Is it a phased array formed by the two stations?
Hello. This was recorded while I was testing out a multi KrakenSDR networked setup. Each device had an antenna array setup for 466 MHz. The software is what you see me manipulating in the video, both the KrakenSDR software on the devices and then also software meant to grab and display the information.
The lines of bearing you see on the map are bouncing around when the transmitter is not transmitting. When you see them converge is when the person on the shore is holding down the transmit button. If the person had been quickly clicking it on and off you would’ve also seen the lines of bearing and the software determine the location.
The two stations are independently identifying the location via the KrakenSDR (5 software defined radios inside) and it’s antenna array. The information from the two units is feed to either an android app, the KrakenSDR dash, or DF Aggregator. The last two are what I used in that video.
On reflection, I conclude that it’s probably for the best that I have no idea what The Steam Deck is.
We’re in the information age, just use your favourite search engine to figure it out 😉
Yeah, but he’s got a point: “steam deck”, “kraken”, “DF aggregator”, I am not even tempted to watch the video when the description is a big wad of jargon.
If it helps, the main site for KrakenSDR just went active, pretty slick.
https://www.krakenrf.com/
And for DFA
https://github.com/ckoval7/df-aggregator