What’s better than a pretty nice legged robot? One with an alternate SDK version that opens up expensive features, of course. The author didn’t like that the original SDK only came as pre-compiled binaries restricted to the most expensive models, so rolled up their sleeves and started writing a new one.
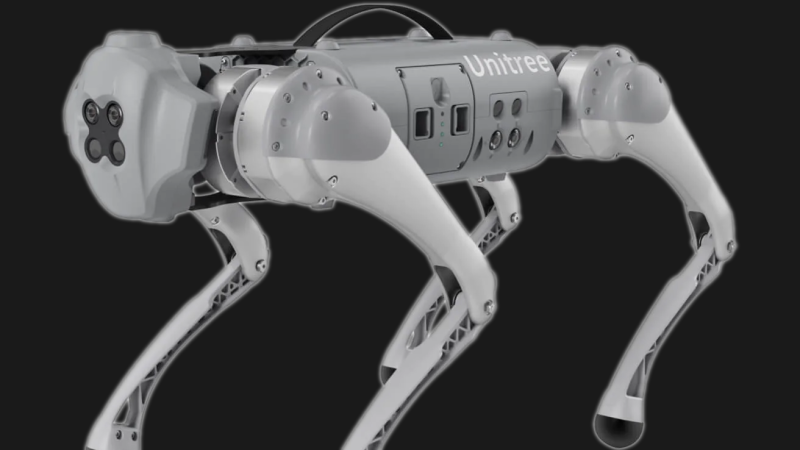
There are a number of commercially-available robotic quadrupeds that can trace their heritage back to the MIT Mini Cheetah design, and one of them is the Unitree Go1 series which sports a distinctive X-shaped sensor cluster on its “face”. The basic models are affordable (as far as robots go, anyway) but Unitree claims only the high-priced EDU model can be controlled via the SDK. Happily, the Free Dog SDK provides a way to do exactly that.
The SDK is a work in progress, but fully usable and allows the user to send various high level and low level commands to the Go1 robots. High level examples include things like telling the robot to perform pushups, turn 90 degrees, or walk. Low level commands are things like specifying exact positions or torque levels for individual limbs. With the new SDK, doing those things programmatically is only a Python script away.
Know any other robots that might be based on the same system? This SDK might work on them, too.













Better looking dog than Dr. Who’s K9
“Affirmative”
the face of it looks way too much like the cybermen.
You’re right. At least it does not look like a Dalek
Well done. I deeply dislike when businesses make such moves, “buy the expensive one to keep ewaste in check”
Especially since it seems quite clear that the SDK in question is not where all the r&d went? If one person can remake it on their free time?
I’d be tempted to buy the smallest model, but I’m concerned about dependencies on closed source apps, subscriptions and all similar potentially spyware-ish things. Does this work 100% unconnected, or connected only where the user wants? The purpose of a connection might be as a theft defense, since I’m completely sure that in some areas the chance of it to be stolen would be 1.
At $2,700 I am still thinking this is not a toy.
So… does anyone know, where are these and similar robots actually being used as tools?
Or is that all still theoretical.
FWIW, we’ve also hacked the go2 in the same way. The pay to play price scheme is dead… you can now run EDU commands on an Air, or Pro go2 dog, just like we did with go1. https://x.com/d0tslash/status/1763585668033249701
The Unitree Go2 has been hacked! The Go2 Air and Go2 Pro models now support secondary development, just like the high-end Go2 EDU model. Enjoy the jailbreak at https://jailbreak.theroboverse.com/. For instructions, visit the manual at https://wiki.theroboverse.com/en/firmware/root/jailbreak. Don’t forget to check out the Go2 Discord group as well at https://www.theroboverse.com/