What’s better than a pretty nice legged robot? One with an alternate SDK version that opens up expensive features, of course. The author didn’t like that the original SDK only came as pre-compiled binaries restricted to the most expensive models, so rolled up their sleeves and started writing a new one.
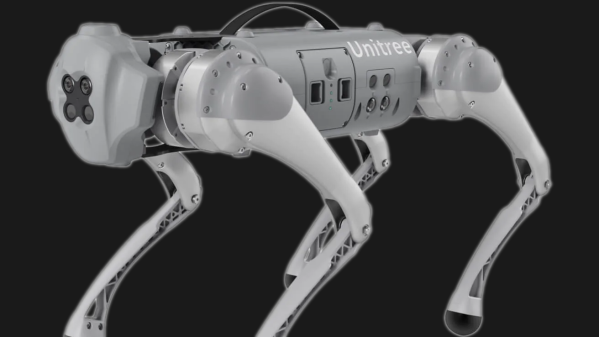
There are a number of commercially-available robotic quadrupeds that can trace their heritage back to the MIT Mini Cheetah design, and one of them is the Unitree Go1 series which sports a distinctive X-shaped sensor cluster on its “face”. The basic models are affordable (as far as robots go, anyway) but Unitree claims only the high-priced EDU model can be controlled via the SDK. Happily, the Free Dog SDK provides a way to do exactly that.
The SDK is a work in progress, but fully usable and allows the user to send various high level and low level commands to the Go1 robots. High level examples include things like telling the robot to perform pushups, turn 90 degrees, or walk. Low level commands are things like specifying exact positions or torque levels for individual limbs. With the new SDK, doing those things programmatically is only a Python script away.
Know any other robots that might be based on the same system? This SDK might work on them, too.