[Ben Katz] designed the original MIT Mini Cheetah robot, which easily captured attention and imagination with its decidedly un-robotic movements and backflips. Not long after [Ben]’s masters thesis went online, clones of the actuators started to show up at overseas sellers, and a few months after that, clones of the whole robot. [Ben] recently had the opportunity to disassemble just such a clone by Dogotix and see what was inside.

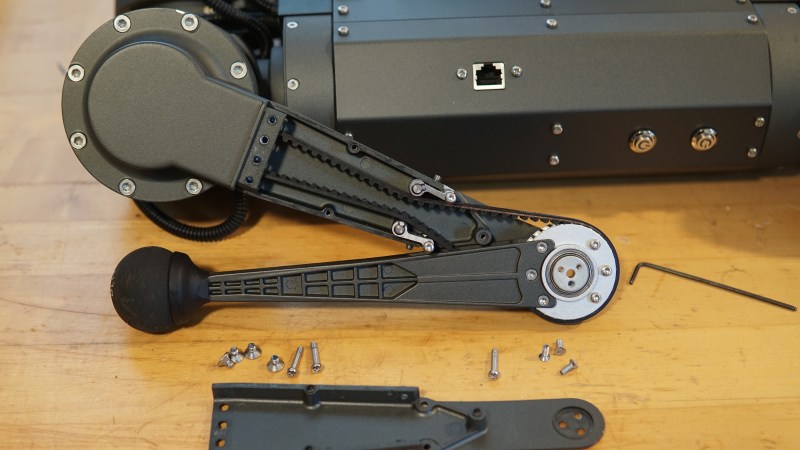
Amusingly, one of the first things he noticed is that the “feet” are still just off-the-shelf squash balls, same as his original mini cheetah design. As for the rest of the leg, inside is a belt that goes past some tensioners, connecting the knee joint to an actuator in the shoulder.
As one may expect, these parts are subject to a fair bit of stress, so they have to be sturdy. This design allows for slender yet strong legs without putting an actuator in the knee joint, and you may recall we’ve seen a similar robot gain the ability to stand with the addition of a rigid brace.
It’s interesting to read [Ben]’s thoughts as he disassembles and photographs the unit, and you’ll have to read his post to catch them all. But in the meantime, why not take a moment to see how a neighbor’s curious sheep react to the robot in the video embedded below? The robot botches a backflip due to a low battery, but the sheep seem suitably impressed anyway.














This is why you should either patent your stuff or make it “as a service”. Bill Gates can buy anything and play any video game he wants. By comparison Richard Stallman can’t even afford decent clothes. If Linux was paid software it would be better.
If Linux was paid software, it wouldn’t be what it is. It’d be Windows, with all the lock-in and “keep up with the rat race” that it includes.
I’ve been using Linux since about 1996. I prefer it to Windows, though I have to use Windows at work.
I prefer the ideals that Stallman and Torvalds represent over the lack of ideals that Gates represents. “Gimme more money” just doesn’t inspire me.
Some people do things to learn. Some people do things to help other people. Some people do things just to get more cash.
It takes all kinds of people to get things done in this world, but I know I prefer those whose main goal isn’t merely to fill their own pockets as full as possible.
Great answer!
To what purpose, what service? This project is the result of a master thesis IIRC, it doesn’t really fill any marketable need. It is a really good applied research project that could be the starting point of other marketable developpements. Leaving it open is a way of boosting innovation, and makes a lot of sense when an organization is there to research and not specifically to make money (even if they are always happy to get more funding). The fact that it’s pretty hard to actually find those clone robots available after a couple of years also shows that the market is not really there. Look at boston dynamics, they are still struggling to market their robots.
In the same way, if Linux was paid software, maybe it wouldn’t exist at all today. In what market Linux would have been competitive at the time? Was there room for a new competitor? I’m not sure, but what I am sure of is that Linux plays a bigger role in computing than any other OS competitor in the current times.
The “as a service” business model is actually an interesting lead on how to market free software: provide knowledge about your system for people to understand it and potentialy improve it or create new uses, while making it easier for a person to pay you regularly instead of deploying it themselves. Of course you have to absorb the NRE costs compared to any competition that could just copy your service, but there are ways to counter that (mainly closing parts of the functionnalities sadly).
As for Stallman and Gates, your comment is funny, but they simply followed different goals. Not everything is about getting more money than needed.
(Also, good luck enforcing a patent in China, your best option is probably to keep everything secret.)
I think the point is that innovative companies like you cited in Boston Dynamics are unlikely to be able to continue to innovate if knock off clones of their products keep appearing from China. You can’t survive if you pay for all the R&D and someone else gets to commoditize your product.
The point of the author in working on his master’s degree probably has something to do with wanting to be compensated at some point to pay for his education. Maybe he does not need to be Bill Gates but he probably would like to eat and be able to afford a nice vacation some day. No one can really afford to be absolutely altruistic when performing their craft.
Indeed, but the mini cheetah wasn’t a development from Boston dynamics. I was only referring to this company to illustrate the lack of existing market. Their work is not open AFAIK, and it potentially won’t make them successful if there are no problems to solve economically with their solutions. Funding this kind of project publicly to open the results may be the best option, in order for future commercial developers to find a way to use (part of) it and market it.
I think we shouldn’t be that afraid of the copying of the results of such projects. They are far from commercial products, and a big part of the valorization of such results actually comes from the know-how of people working on them. If you’ve read Ben Katz’s blog entry, you’ve seen that he immediately noticed some dumb vestigial design aspects that he would have immediately changed. The Chinese didn’t because they don’t understand the project as much as the original team. And if they did and actually changed the design, it would be to the benefit of everyone (ideally, if they respect the licensing terms). In that way, a future company hiring Ben Katz or people having worked on the origonal project would have a significant edge over potential copying competition, at least for a couple of years.
I get that it’s not reassuring to investors when you don’t have a nice description of your valued and locked down IP to show them, but it shouldn’t be frightening to engineers.
As for the author of the project, I don’t know about the MIT rules, but I would be extremely surprised if the original author has any ownership on the intellectual property generated by his project. Making the results open may actually be the only way for him to keep using the results of his work…
Also I’m not talking about being altruistic. To reassure you, people working in research center are still paid, just not necessarily to generate directly profitable results. You could also argue that he found retribution in the fame he got from the project, the knowledge he acquired, the entry in the resume and the degree he received. I have no doubt a graduated MIT engineer will find ways to be able to eat and take some vacations ;).
The inescapable fact is that if you open source your design it is a lot harder to make a profit on it. You have all the NRE and research costs and your competitors don’t, hence they can sell it for less and still make a profit. If it is open source anyone can make it themselves. In the case of software it completely removes the ability to profit from it unless you offer some form of technical support. Considering robotics is very software based it isn’t a good idea to open source any of it if you want to make a profit.
In order for open source to be profitable you need to provide something the user can’t provide for themselves. For physical parts that is easy, most people don’t have access to or it is to expensive to have the part machined or injection molded. For software when anyone can download and run it you can’t make much profit, a lot of companies that make open source software ask for donations, that should tell you something about it’s potential profitability.
For software there are certain steps you can take to make it profitable, again to do with providing things that the user can’t, like web hosting or technical support.
You can never avoid the copying problem though. The only way around it is keeping at least part of the system closed source but even then someone might find a way to reverse engineer it and the open source community wouldn’t like it much.
Often universities allow students to patent their designs and can even help the students with the patent process, it all depends on the project proposal and the agreement with the university and any agreements with anyone that funded the project. It absolutely is possible and often encouraged to patent any new ideas you have during your time at university and I know of a few students at my university that have turned a project into a full business, I think the university offers its support for a fraction of the company and staff working at the university are open to create their own deals (some have companies themselves that are independent of the university). The goal of universities is to teach and to do research, none of it needs to be open source
Simply put Ren, people that create as a passion instead of a career drive science and technology.
People that create for a career instead of a passion drive the economy.
Look at the 3d printer world for a good example. The hobbiests drive the industry forward
In what world?
Are hobbyists creating polyjet 3D printers? Are they creating functional metal 3D printers?
I don’t think so, all the advanced and new features tend to come on expensive closed systems first, this even applies somewhat to slicers.
Hobbyists may be driving demand, but for the most part they aren’t driving the industry forward. Most new open features tend to come from research labs or master’s thesis anyway, not really from hobbyists.
If linux was paid software, it would have never achieved adoption and would become a proprietary shitpile even if it did survive ten years (more likely it would be nothing more than a stub article in computing history by now). SaaS is dreck and represents a slide into techno-Lysenkoism. Total drain of competence on a long enough timeline
Well BSD is free and just look at how it’s taking the world by storm. Maybe, being free isn’t enough for success.
The reason why BSD isn’t taking the world by storm is because of the success of Linux, and the success of Linux is due to AT&T’s attacks against BSD in its early days.
iOS and macOS are based on BSD… they haven’t maybe ‘taken the [whole] world by storm’ but I’d say they’re doing pretty well?
If RMS cannot afford decent clothing it’s of his own doing.
My favorite parts is how the product manual talks about their “patented technology” dual absolute encoder and their “three years of painstaking development”. Typical. Even if the original author did not patent the device, they should have at least given a shout out for using his idea. If China will not respect other people’s work they should be removed from the WTO.
Agreed. The CCP should have been economically forced into breaking up after the 1989 Tiananmen Square Massacre, similar to what happened to the Eastern Block in soviet Europe.
They like to pretend they’re “one people one China” but there are 50 or more different ethnic groups and anywhere from 3 to 23 (or more depending on who you ask) different regions. It is past time for those regions to be independent nations. Let Xi the Pooh keep Beijing, the rest of the world can fence it off and treat it like a nature preserve, a living example of what NOT to do.
The sensoring of the actuator is actually partly innovative. But it would have been nice to open it (and maybe mandatory, depending on the license).
About China, I have mixed feelings in this regard. On one hand they can simply rip people’s work and make more margin because of their extremely low cost of production, killing the devs, but on the other hand I had interactions with Chinese companies about having access to their source codes that I wouldn’t dream to have with EU or US companies. In one case, it was because they weren’t respecting an open license, and they fixed the situation immediately. The lack of openness was more due to a lack of care but they were happy to comply. I have yet to encounter such interactions outside of China…
I’m not going to totally defend China’s approach to intellectual property, but what often gets elided in these discussions is that IP isn’t a free-for-all in China, they just have a different system. Bunny Huang has a nice explanation of this: https://www.youtube.com/watch?v=y5QkM2Work0
Remove China from the WTO to protect western laborers and inventors? LMAO what do you think global trade is for? Helping you?
Kinda reminds me of the tendons in a horse’s leg. There’s really not much down there except.. well, biological equivalents of drive belts, tensioners, and pulleys. Which is also why the legs never heal right. They barely even have blood below a certain point.
It is always interesting to me how much history is lost. How can you “clone” something that is open source, and openly shared? Most quadruped research was funded by DARPA, and the research was all done out in the open, and documented in many papers, and git repositories. “Chinese clone” always has a negative connotation?
I’ve written about some of the past here:
https://github.com/MAVProxyUser/ConsumerQuadruped
Mind you… these companies that fail to directly credit MIT (until forced) like Unitree, are being unscrupulous to say the least. https://github.com/unitreerobotics/unitree_legged_sdk/issues/55