[Aaed Musa] has built a variety of robots over the years, but found off-the-shelf servos to be underwhelming for his work. Thus, he set out to build a better actuator to support his goals of building a high-performance walking bot in future.
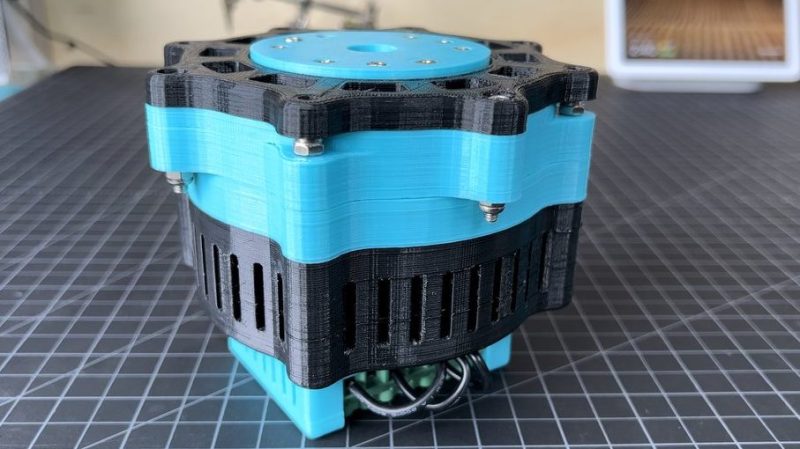
[Aaed] decided to try and build a quasi-direct drive actuator, similar to those used in MIT’s agile mini Cheetah robot. It consists of a powerful brushless DC motor driving a 9:1 planetary gear reduction built with 3D printed parts, which provides high torque output. It’s designed to be run with an ODrive S1 motor controller with encoder feedback for precise control.
The actuator weighs in at a total of 935 grams. It’s not cheap, with the bill of materials totaling just under $250. For your money, though, you get a responsive robotic actuator with a hefty holding torque of over 16 Nm, which [Aaed] demonstrates by having the actuator shake around some dumbells on a long lever arm.
Walking robots have exploded in popularity ever since Spot hit the scene. We’ve seen everything from complex builds to super-simple single-servo designs.














Nice build and video. We are designing an actuator system at my employer that is very similar to this design (albeit much smaller). One key takeaway that we found was gear quality is paramount to efficiency. We went with cheap quick turn metal gears for a prototype and paid the price in noise and efficiency loss.
The premade motor ($61), motor driver ($149), are almost all of the cost ($210 of $247). No idea how much the gears cost but I’m guessing it’s at least half of the remaining cost. It’s pretty clear what you build yourself to reduce the BOM here.