If you’ve been making up for lost years of travel in 2023, you might have seen a fellow traveler in the airport terminal or train station walking with their luggage happily careening behind them. [Jesse R] and [Brian Lindahl] wanted more of that. They wanted an open-source, low-cost system that could be put in anything.
The basic principle is that they will have a transmitter that sends both a radio signal and an ultrasonic pulse. The receiver receives the radio signal and uses it as a reference for the two ultrasonic sensors. The time since the radio signal is compared between the two, and a distance and direction are established.
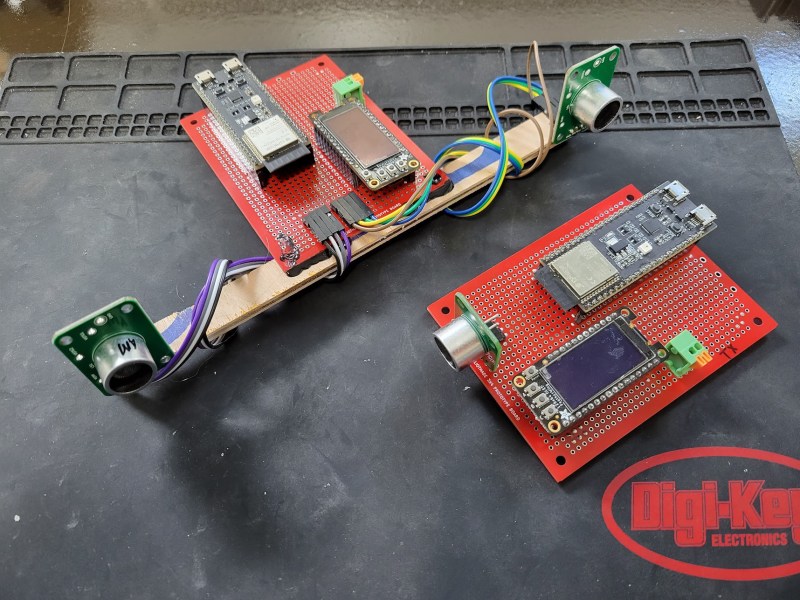
In practice, the radio is an ESP32-S3 using ESP-NOW (which we’ve seen relatively recently on another project), a protocol from Espressif that offers low latency 250 bytes payloads. The ultrasonic transceiver is based on Sparkfun’s HC-SR04. For prototyping purposes on the receiver, they just removed the transmitter to avoid populating the airwaves, as to listen, you had to transmit. The prototype was an electric wheelbarrow that would happily follow you around the yard wherever you go.
With the concept validated, they moved to a custom ultrasonic setup with a custom buffer amp and damp transistor, all centered around 20kHz. The simulations suggested they should have been better than the HC-SR04 from Sparkfun, but the 30-foot (9 meters) range went to 10 feet (3 meters). They ultimately returned to using Sparkfun’s circuit rather than the custom amp.
We’re looking forward to seeing the project continue. There are various challenges, such as variability in the speed of sound, echos and reflections, and ultrasonic line of sight. We love the peak behind the curtain that allows us to see what decisions get made and the data that informs those decisions. All the code and PCB design files are available on GitHub under an MIT and Creative Common license, respectively. This project was submitted as part of the 2o23 Hackaday Prize.
Video after the break.















Savvy readers may remember this concept from https://hackaday.com/2012/04/20/one-hackaday-readers-experience-going-on-the-ben-heck-show/
After years of people reaching out to replicate this project I’ve decided to update and release the design in an easier to use package.
Yes! Robotosize my garden now!!
Nice. I was hoping to see that vague time of flight feature on new ESP32s be put to use. I haven’t heard anything new about it in a while.
Was there a peak behind the curtain, or a peek behind the curtain?
I remember a sci fi story airport that had these, you put coins in and the device would grab your luggage and follow you around the airport. It was in the form of a dog, and would grab the suitcase in it’s “jaws” (with no teeth) to carry. When the money ran low it would whine, when the money ran out it would bark once or twice, then put down the luggage and go look for more fares.
Very nice project.
Should be tested in a crowd, where people can walk between the barrow and user, briefly confusing the ultrasonic sensor. Also, the barrow should be able to detect when it’s lost the user. When it’s lost, it should stop, do a 360 and scan for the user, then catch up. Maybe test in an environment with columns and other vertical obstructions (such as a museum) to work the error recovery functions.
I can see use cases for which carrying a beacon is useful, but would be really nice if the system could somehow use AI to follow the person visually. Maybe pair with the person’s phone, or QR code to install an app and then send GPS info back to the barrow.
Still, very nice project.
This reminds me of the first automated following golf bag 2-wheel cart design I saw sometime in the late 1970s. I was a caddie for a time then.
The golfer carried a pager-size transmitter that operated around 1 MHz (in the AM broadcast band), and just transmitted a continuous low-power unmodulated carrier.
The golf bag cart had two motors, one in each wheel, and its receiver had pair of crossed ferrite bar antennas. It compared the signal strength in the two antennas. If one antenna signal was lower than the other, it turned on the motor that moved the cart to aim it toward the transmitter. If both signals were weak, both motors turned on to move the cart toward the golfer. If the signal got too strong, the cart stopped, a few yards away from the golfer.
No computer. Barely any smarts. Worked like a charm. Genius.
When I originally did this project I considered RSSI but my limited experience with it was that it was not very accurate, and the project was on a deadline and was a proof of concept, so I went with Ultrasonic and Wireless together, and it worked pretty well. This project is just an extension of that project from like 10 years ago (Robot Luggage Ben Heck Show) because people have been asking for assistance replicating it ever since it’s release. So hopefully we can make a system that is more plug and play for those wanting to add following to their projects. I personally just want a bucket to follow me at conventions so I can throw free stuff into it :-D
Keep in mind that cats and dogs may not like ultrasounds at all, or possibly could be attracted by them, which was the case of two of my cats that ran to my lab every time I was experimenting with ultrasound transducers. They were so sensitive that connecting a 40KHz capsule to a function generator set to the transducer resonance frequency without any amplification was enough to trigger their interest and have them run to the lab meowing from two rooms away.
This seems like a good use of an BLE beacon since they can give distance + direction
“to avoid populating the airwaves” you meant polluting?
To some people you are adding to the population of transmitters in range. To others you are polluting.
I’ve actually been thinking about being able to do this in reverse.
Have a drone stay x feet in front of me and Z feet above me and track my movments.
My personal use for this would be a truly cool action cam, personally thinking about motorcycling.
GPS of roiute could be plugged into drone so it knows when I am schedule to turn left etc.
It would also need obstacle avoidance on the front so it does run into a stop or other vehcile, low hanging branch etc.
With a follower, you need to consider max pace of person being followed, the max weight of the object following and the stopping distance if something (small child) get in between.
You need almost all the same avoidance conditions as a self driving car albeit easyier to obtain with a much lower speed setup.
The GPS/BLE could work very well in an airport setup where these were rentals and the airport deployed BLE location beacons or even maybe inductive beacons in the floor. This could then move the luggage in a safe path and still arrive where the user is but not necessarily stepping in their foot prints.
Hell, lets be honest — I’d settle for one that went to the fridge and retrieved things for me. Yeah, just what we need — something to make socity even more sedetary that it already is!
Ex paed onc RN here. Absolutely need this on IV poles to follow the wee ones as they run about. I know, medical use certification/safety and all that but make it happen man like there is a REAL need.
Terry Pratchett / The Luggage anyone? :)
Rincewind’s luggage. Just what I was thinking. https://wiki.lspace.org/The_Luggage Does anyone know a source of sapient pearwood?
Typo: “damp” transistor?