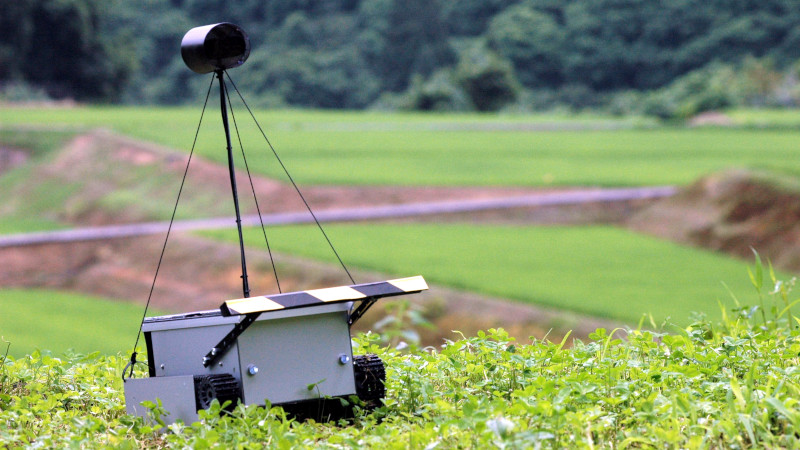
It’s a problem common to small-scale mixed agriculture worldwide, that of small areas of grass and weeds that need mowing. If you have a couple of sheep and enough electric fence there’s one way to do it, otherwise, if you rely on machinery, there’s a lot of hefting and pushing a mower in your future. Help is at hand, though, thanks to [Yuta Suito], whose pylon-guided mower is a lightweight device that mows an area defined by a set of orange traffic cones. Simply set the cones around the edge of the plot, place the mower within them, and it does the rest.
At its heart is a computer vision system that detects the cones and estimates distance from them by their perceived size. It mows in a spiral pattern by decreasing the cone height at which it turns, thus covering the whole area set out. Inside is a Raspberry Pi doing the heavy lifting, and because it’s designed for farmland rather than lawns, it has an adaptive track system to deal with obstacles. In its native Japan there is an ageing rural population, so it is particularly suitable for being operated by an older person. See it in action in the video below the break.
A robotic mower aimed at farms is certainly unusual here, but we’ve seen a lot of more conventional lawnmowers.
















Is that realistic frame rates represented in the video or is that processed on a different computer for the video?
This video is for illustrative purposes only and was inferred on another computer. On the robot itself, it is about 1 FPS at 320*320.
I can’t be the only one looking at this and thinking that it needs a more robust mechanism to detect boundaries?
I mean, “sharp spinning blades” dangers aside, the neighbors might not appreciate you mowing their vegetable garden
Thank you for your comment.
I have tested it in my yard and my neighbor’s yard for dozens of hours and had no problems, but I understand that you still have concerns about the boundary detection. Would it still be safer if it were surrounded by a rope or something?
I will also mention the blade risk on the project page and in the repository.
One would think the navigation problem would be easier with a relatively static piece of land compared to what autonomous vehicles deal with.
Yeah not sure why you wouldn’t want to use a GPS geo fence. Then there’s no chance it hicups past the cone. And I only have to walk out to measure the fence once instead of every time I lay out some cones.
Thank you for your comment.
I chose to use computer vision instead of GPS for the following reasons
* To allow passersby to see at a glance how far the work area is.
* To allow even first-time users to intuitively understand how to operate the system.
* The more we let them mow, the more images will be collected. In the future, if the accumulated images are segmented and trained, the computer may be able to make all decisions without any settings (even walking).
Maybe because of the poor GPS precision ? 3m apart and you’ll get angry neighbors. Most robot mower use a underground wire and it’s working perfectly fine. But this requires a lot of work to install.