Even with all the technological advancements in recent years, autonomous systems have never been able to keep up with top-level human racing drone pilots. However, it looks like that gap has been closed with Swift – an autonomous system developed by the University of Zurich’s Robotics and Perception Group.
Previous research projects have come close, but they relied on optical motion capture settings in a tightly controlled environment. In contrast, Swift is completely independent of remote inputs and utilizes only an onboard computer, IMU, and camera for real-time for navigation and control. It does however require a pretrained machine learning model for the specific track, which maps the drone’s estimated position/velocity/orientation directly to control inputs. The details of how the system works is well explained in the video after the break.
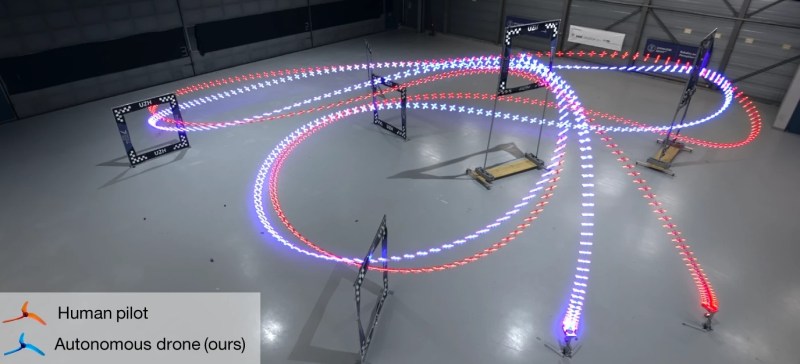
The paper linked above contains a few more interesting details. Swift was able to win 60% of the time, and it’s lap times were significantly more consistent than those of the human pilots. While human pilots were often faster on certain sections of the course, Swift was faster overall. It picked more efficient trajectories over multiple gates, where the human pilots seemed to plan one gate in advance at most. On the other hand human pilots could recover quickly from a minor crash, where Swift did not include crash recovery.
The final results are impressive, especially given that all the processing and sensing comes from the drone. However, it still requires a well mapped track, so a human pilot should still come out on top given limited information about a new track. It would also be interesting to see how it handles large courses with gates that are much further apart.














Taking the human element out of racing makes it seem a lot less interesting to me. Maybe I’m just old school.
Its just a repeat of whats happened in chess.
I think there’s space for both. I’d love to see groups of university students compete against each other, and I also love watching humans race against each other.
I meant to say “groups of university students race their own autonomous drones against each other”
Hackaday. Edit button when?
When we give up on anonymous comments, or the one plugin that we found that would work fixes up its XSS problems.
Sorry!
I support this tradeoff. Support for anonymity is great!
Also, slashcode is free and open, and supports nested comments way better than wordpress. If you can nest very deep comments, you don’t need an edit button, you can just post a reply to yourself with the corrections.
Intramural gladiatorial games? I’m in!
Strapping a grenade to an autonomous drone should make it more interesting again.
Or a scalpel, for chirurgical strikes.
Oh, hello fellow Pole (or other Slav). In english it’s “surgical strike”.
It was chirugical in the 18th century, maybe he’s just really old?
The grenade on the drone works great until it leaves and you turn to another soldier who is walking away and yell.. “get back here!”
Unbelievable. When these drones are equipped with small weapons and sent into urban combat. Minimum shots and maximum hits, that’s what I call job security.
Actually it doesn’t take humans out of it. It just changes the role of the humans. They become the developers of better algorithms to have robot pilots compete. So now you have human developers competing instead of human pilots. Still interesting but less exciting. But we can have both types of contests!
Solid
In the future robots will fight wars in space or possibly from the tops of very tall mountains. But we will need people to build and maintain those robots. (Something like that…)
I think we should name these fighting robots something that defines their purpose. Something like “Terminator” would do quite well. Then perhaps we can train an AI to control them.
A demo scene starring drones.
If you can bet on it people will watch it.
Add in the race the mario cart questionsmarks and everthing is interesting again.
If you have all the data ready. You could calculate the best flight path and speed with a 8bit computer.
The problem is to capture the data in realtime and to process it equally fast. But then racing is just control theory (with added fun).
That means if the flight software is out of it’s infancy no human pilot will ever have a chance again.
^ this, I find this almost a non-story because if you can get the data into the computer accurately & quickly enough the rest is a pretty simple control problem.
Assuming the data from the sensors are 100 accurate, which is not the case. So looks easy if you havent tried it yourself yet
Looks like the advancement here is more in regard to the drone figuring out where it currently is and what it needs to do to stay on course, which is a lot harder with just a camera and IMU.
In this case I’m impressed by both the humans and the robots.
It’s only a matter of time before robots become better drone racers, because for a robot time is meaningless as you can always optimize algorithms and speed up the hardware so it can see everything in slow motion compared to a human. It has all the time in the world to calculate thousands of possible decisions like a game of chess.
The humans have a slower reaction time and therefore start later and are less consistent, yet they still won almost half the races against the robot! The robot does win most races but needs a pre-mapped circuit and needs to learn for 1 hour, while humans have better general intelligence and can handle new situations better.
Very similar to this are the micro mouse contests. These started off as a vehicle to give university students and excuse to make practicing programming more interesting, and that is still the goal. Some 15 years ago it was thought that their speed limits were near the limit of what could be done, but students have been pushing the limits ever further. From downforce generating fans to sticky wheels and now those things are pulling multiple G-s on tracks that are barely twice the with of the mouses themselves. I’d say that a human with remote control for a micromouse would be very unlikely to be able to get even close the performance of these software controlled things.
But the unforeseen consequence is that (at least in my country) robot-sumo, linefollower and micromouse competitions organized by universities are now dominated by a group of dozen or so rich guys in their 40s with access to all the juicy CNC machines, super high quality electric motors, expensive electronic parts, high grade steels and composites etc. It’s like a professional footballer in his 30s joining U-15 football club – sure you’ll dominate every match, but it’s fucking stupid.
There was a time when sumo robot made with some steel scrap and motors ripped from a broken cordless drill could compete and even have a chance of winning in those tournaments. It was also a time when university robotics clubs thrived across the country – keep in mind, those are almost always badly underfunded, but also, the barrier of entry was super low. Same for micro mouse and linefollowers.
(Note: when asking university staff for access to university’s well equipped machine shop, their reaction was like “u wot m8?” So it’s a no-go there and the only option left is to DIY.)
However, even before COVID those robotics clubs started losing members. There’s no point in travelling 300 kilometers or more to take part in a competition, when after a first round (that is, in about 20 seconds) you’ll be out. Comparing the news you can see the same faces and same robots taking prizes across the country.
Pandemic was a kiss of death for many of those clubs. In case of our university, the robotics group was disbanded this year. With semiconductor shortages, economic downturn and no one around to pass unwritten know-how, social customs and traditions (like beer and pizza day every other Thursday) there were no new members. What used to be our small workshop (and almost like a social club or “hackerspace”) in university building basement was cleared and turned back into a storage room.
Sadly it’s too niche of a thing to implement cost or performance groups or something (like it’s done in car racing).
Just wondering, is Ai making decision real time? Or is this preprogrammed. Ps I’m encouraged that humans are still beating robots at this, they certainly are not in other nonflight areas, such as milling machines or 3d printing.
A.I. is specific pre programmed. Search online for ‘click worker’ documentations. Many big A.I. companys have SUB companys in third world nations. Some have ‘non profit organisations’ in africa. Mostly black people sit infront of old laptops and look at pictures, marked them and descripe for some Cents of wage. It’s feels like everything what a white scientist do, at the end a black guy is still the slave of them.
As a other example Facebook outsourced the violencefilter to the philipines. People watch there a lot of cruel posts to filter them. The worker get’s trought the work mentally depressed.
Everything in our western world is of the cost of others. But better live here :)
The operating environment of a physical robot, especially a drone, is far too unpredictable to simply run preset commands. It is trained and specialized on the track it’s going to run, but it has to adapt to inconsistent sensor accuracy, air movement, etc. in real time.
You just need to introduce some unpredictability into the course, like have a herd of inflatable dinosaurs walk through the course mid-race, then release some balloons, then an explosion of glitter.
add one of those great big industrial fans and have it turn on mid-race.
Make the events in every race unique and non-repeating
robots hate unpredictability. Humans love it.
Have the drones be able to take down each other with spikes and everything, make it like in chariot races !