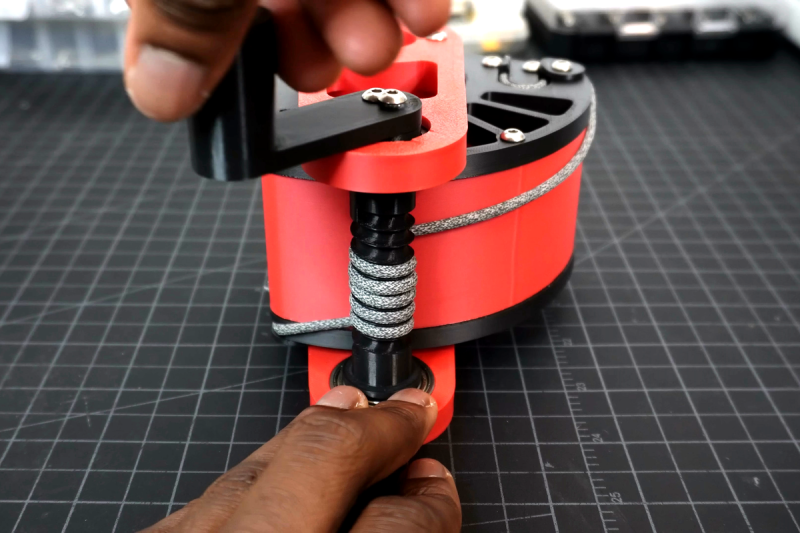
Zero backlash, high “gear” reduction, high torque transparency, silent operation, and low cost. What is this miracle speed reduction technology, you ask? Well, it’s shoelaces and a bunch of 3D printed plastic, at least in [Aaed Musa]’s latest installment in his series on developing his own robot dog.
OK, the shoelaces were only used in the first proof of concept. [Aaed] shortly upgrades to steel cable, and finds out that steel fatigues and snaps after a few hours. He settles on Dyneema DM-20, a flexible yet non-stretching synthetic rope.
Before it’s all over, he got a five-bar linkage plotting with a pencil on the table and a quadriped leg jumping up and down on the table — to failure. All in all, it points to a great future, and we can’t wait to see the dog-bot that’s going to come out of this.
There’s nothing secret about using capstan drives, but we often wonder why we don’t see cable-powered robotics used more in the hacker world. [Aaed] makes the case that it pairs better with 3D printing than gears, where the surface irregularities really bind. If you want to get a jumpstart, the test fixture that he’s using is available on GitHub.
If you want to learn more about capstan drives, you absolutely need to check out our own [Sonya Vasquez]’s Cable Mechanism Maths. She brought some demos of her gear reduction mechanisms to Supercon, and they just feel like butter. (If I were a robot, that’s how I’d want my knees to feel.)














On his website, he spells his name Aaed Musa.
His website is awesome too!
Thanks aaed, very cool!
How did I get that wrong every time!?!
Fixed, thanks.
This is a really cool video. Good technical explanation and deep technological insight.
I’m really fascinated. Congratulations :-)
Oh look: someone has reinvented the dial cord! But that’s a good thing – the use of cord and pulleys allows for very flexible mechanisms for transmitting force from one shaft to another, even if the shafts aren’t parallel to each other. And it’s good to see old ideas we thought were obsolete being applied to new applications.
This doesn’t always go well: I remember Whirlpool made some compact washing machines that used four steel wire ropes to do the agitation, converting rotary to reciprocating motion. The wire ropes wore out quickly, and when one frayed it generally destroyed its neighbors, and they were a cast iron pain to replace. On the other hand, IBM used thin metal tape to transmit rotary and angular motion to the typeballs in their Selectric typewriters, which worked pretty well.
> This doesn’t always go well: I remember Whirlpool made some compact washing machines that used four steel wire ropes to do the agitation
Yeah, from article above:
> [Aaed] shortly upgrades to steel cable, and finds out that steel fatigues and snaps after a few hours. He settles on Dyneema DM-20, a flexible yet non-stretching synthetic rope.
That’s reminded me – some floppy drives used a metal tape to drive the head in & out, a very neat and compact mechanism.
IIRC The old Teac 5.25″ floppy drives had them, as did some old stepper motor-actuated HDDs.
gm electric windows used them too.
http://www.youtube.com/watch?v=d5rW-0_X99Q
So do Porsche and VW group
Seagate used this exact mechanism in their old MFM drives, like the ST-251.
https://www.youtube.com/watch?v=wvDe6oi4Oa8
What wonderful lesson! And what a wonderful mechanism! His website joined my favorites in a second!
That cord is going to stretch… it’s going to be impossible to maintain datum and accuracy over time.
Not really – as long as your homing or feedback sensor is based on the output lever side it will get to position with reasonable accuracy even after the cord has stretched an implausible amount. The worst you might end up with more slop in the movement and a longer delay in changing directions but the drive to position accuracy should be fine.
Also generally once you have stretched the weave it stops stretching any further until it is wearing thin – adjustments required in the first week or two of operation, or when the load applied by the operation increases and so could stretch it out more but nothing major. You can buy ‘pre stretched’ in many materials to cut down on that adjustment as well.
In the video he pointed out that cords stretch and then selected a material that has a very low amount of stretch, then ran a stress test for a week to confirm that it won’t stretch too much
It all depends on what your repeatability and service period requirements are. If you can get away with periodic auto-homing (dependent mostly on whether you can get the required precision from the homing sensor/mechanism) then that service period moves from the amount of time for infentessimal stretch to the amount of time for enough stretch that slop, and thus greatly increased wear, is introduces. I imagine that’d take you from anywhere in the 1-8wk period for the DM-20 to probably somewhere around a year, though I’ve never personally designed a cable-based actuator (other than a dumb little battery spinner).
For his application, where repeatability down to the arcsecond over the span of days isn’t of the utmost importance, and he can re-home every time the quadrupedal robot starts up, the stretch isn’t much of a concern, and the reduced travel mimics biological joints just fine.
Dyneema is used in sailing with tremendous loads and it’s almost stretch free, under low loads it will not stretch at all.
I’m somewhat amused by Dynamica’s recommendation of treating DM-20 with mud. It makes sense for sailing but I’m imagining muddy robots.
In the future, all robots will be muddy or bloody,
Wait – how are they getting bloo…
LOL!
From their website (https://dynamica-ropes.com/products/dm20/):
“For some operations, we recommend applying a mud and sand filter in order to protect the rope during the many service years.”
So mud and sand are out because abrasion is the killer of this stuff – particularly so in vehicle retrieval off-road.
Amazingly there are small sailboats that use Dyneema for standing rigging – there’s just enough stretch that you can trailer the rig in, put the mast up and stretch-and-hook the shrouds into the gunwales.
With all of that, I’d love to see a weight comparison for light duty applications that compare the capstan, geared servo, and harmonic drives. I’d bet that you could optimize the capstan to a much smaller weight/power value.
Skyentific has made several video’s about bowden cables and other cable construction for use in robotics.
One of the more interesting video’s is the one below, in which multiple pulleys are used to increase “gear ratio”.
https://www.youtube.com/watch?v=utDagouxM5U
Does anyone know what drawing program he is using on that tablet?
I’m not able to zoom the image enough to see it.
OneNote from Microsoft
Looks like an iPad in a ruggedized case with OneNote
Very professional and informative video.
Aaed is a unicorn. Great technical AND communication skills. He would be an amazing teacher. You can hear the knowledge and passion in his delivery, mixed with just the right amount of humor. Thanks for posting this.
His videos are entertaining to watch. But I find them of limited use for teaching because of the “cool” factor and other “smooth” effects. Fun, but distracting.
A very compact presentation of just the results and comparing of technologies would allow to learn much faster.
I like the turn of phrase. He “settles on” some of the strongest and lowest stretch fibers available on the consumer market. Dyneema is expensive as far as line goes, but bargain basement when you look at the specs.
I think that’s the difference between “settles on” and “settles for” – the former suggests a bird of prey landing on a tasty treat, and the latter is more rolling downhill until you hit bottom. Dyneema is cool stuff, though really annoying to cut…
I’m wondering about the use of that rope in the transmission and spokes of a bike. Continuous rope transmissions were the standard a century ago for factories and farm implements. They rely on being able to join the ends of the rope in a manner that doesn’t introduce a large bulge or knot, though. The (now, sadly, defunct) Gizmologist’s Lair website had a nice primer on the idea (Wayback: https://web.archive.org/web/20200225040710/http://www.gizmology.net/splicing.htm)
Also, since bicycle wheel spokes are in tension, rope spokes should work, and ones that are 1/10 the weight of steel would be nice to have. Not sure how to fix them to the rim to allow tensioning, though. Maybe something like a tennis racquet?
Dyneema spokes exist! Check out Berd Spokes, I haven’t used them, but they are fairly popular. I think they’re looped through the eyes in the hub, and then more typical at the rim.
According to a review I read, the rim end is slipped over a threaded rod like those Chinese finger trap toys, with just a little glue to keep it there until tension makes it “trap”. The threaded rod is then used with a standard nipple. The other end is fashioned with a loop. The loop goes through the hole in the hub, a “pin” made of more UHMWPE goes in the loop, and it can’t back out of the hole. Off to buy some thin Dyneema rope!
The tension on a bicycle spike is shockingly high. So much so that the load of the cyclist is basically rounding error
According to Google:
Capstan drives […] have low inertia, low backlash, high stiffness, and are simple to implement. They are also ideal for precise positioning applications.
So I’m curious why nobody has brought up the obvious idea of making a 3d printer out of capstan drives. What am I missing that would make this a poor choice?
The convenience and simplicity of easy to work with belts, or the almost build and forget about it forever of a decent screw are hard to argue with. Same reason you don’t see many delta printers or SCARA arms (etc) either really. You want it to be easy to build and wouldn’t want your printer needing adjustment and calibration often in the early assembly phase as the rope stretches.
Also using the cheap open loop control and still getting the precision we expect of a 3d printer would actually be somewhat challenging with a capstan concept. Unless you can perfectly control the position of the rope on the capstan at all times and then work out any cosine errors so you know at various points in the machines travel 1 step actually doesn’t take you are far as it does in others. I’m sure you could make a perfectly serviceable capstan system, fundamentally it doesn’t have to be much different to a normal belt drive (though it certainly could be). But as the belts are also cheap, easy to work with and function really well at the scale of most 3d printers…
I’d suggest to really make a capstan driven coreXY or similar layout 3d printer appealing it would have to be a very large machine. As once you get beyond the lengths and machine masses the available belts are easily able to handle you have the choice of going for very long screws which will be expensive and bring their own engineering challenges or you can move to replacing the belts with suitable lines and a capstan – which then gives you lots of somewhat interdependent choices to make on line material, bend radius of the pulleys, drum size, working tension and tensioning methods etc but should at least in theory let you make a high quality giant machine more affordable.
Having used capsstands, ain’t no way 1 person can hold 2 Titanics with 4 wraps. Last pull I did, my capstand was indicating 500lbs with 5 wraps and slipping (rope was oily). Dyneema is really slippery, a bowline will pull out instead of cinching down at relatively low forces. But that’s not the problem.
I’m not seeing how this solves the precision problem of gears. Dyneema is low stretch, but not no stretch. Worse: put an inconsistent load on and it’s going to be hard to get it to coil on the drums with perfect consistency. I’d like to see how calibrated it was after jumping.
One cool thing is it would allow the motor to be removed from the hinge point in the legs, running the cable like a tendon. Nice since it’s going to be larger than a good stepper motor.
I also wonder if there’s be interesting applications with a cam. Probably nothing that can’t be done with constant radius drum and software though.
Tldr: cool but I’m super skeptical that it’s more precise than gears
Like all engineering its a design choice you’d have to make, but capstan concepts certainty do have potential if you want to put in the work to use them.
It doesn’t always matter how badly the rope stretches if the movement of the gantry is dictated by the capstan that is attached directly to the gantry and the rope is held in high tension from the ends for instance then one capstan rotation should always move the gantry the same distance no matter how stretched out the rope is. Which would also keep the loads pretty consistent, and thus make keeping the wrap on the drum consistent easier.
And under those sort of conditions it should be better than gears at backlash, as even the most precise gears must have some, and in practice they probably have quite a lot where in theory the capstan is directly transmitting the rotation – and if its not just up the tension in the rope and add a wrap – as soon as the forces to operate the machine become rounding errors on the tension in the rope those movements are not going to meaningfully change the precision as the rope doesn’t stretch enough to matter and the rope won’t slip because the friction has been cranked so high.
You also potentially gain precision from consistency of the production – making “perfectly” concentric round features is really quite easy but making perfect gear teeth and then maintaining a perfect mesh between them really isn’t – a gear train requires a much greater level of precision in its construction to maintain accuracy.
Which also leads on to service life – you wear the gears out on your bicycle out that is a great deal of spare parts you’ll have to source and fit – probably all the sprockets and the chain will all need replaceing where using a rope drive you’d wear the rope out (comparatively rapidly from the one example I’m aware of being built) but its really cheap and easy to replace, and the rest of the wearing moving elements of importance to its function also exist on the geared bike…
Measuring motor current to detect limits is – different.
Many years ago, I worked on an aircraft Doppler radar system, used to measure ground speed. To detect and measure sideways movement, the main dish was rotated.
Rotation limits were set by micro switches. Beats overloading a motor, I would think.
Measuring motor current to detect limits is perfectly fine and is used in some 3D printers, it isn’t that uncommon.
The stepper drivers in 3D printers control or limit the current anyway so already have that capability built in, then it just needs to stop when there is a current spike. Same with O drives and other similar systems.
It is a system that works very well and reduces the amount of components and wiring needed since you don’t need limit switches. It doesn’t overload the motor since motor current is controlled or limited anyway.
The closest to that is the Positron 3D printer. Its design is very amenable to being entirely made to run using capstan drives with the possible exception of the Z axis since the build plate hangs upside down on it.
“Why has nobody…”?
This is Hackaday!
https://hackaday.com/2017/10/12/this-3d-cable-printer-remixes-the-delta/
https://hackaday.com/2024/01/26/building-a-cable-driven-delta-printer/
and by far the strangest I’ve ever seen:
https://hackaday.com/2023/10/08/marionette-3d-printer-replaces-linear-rails-with-string/
(Can you tell I have an abnormal love for these mechanisms?)
Not sure any of them are technically capstan solutions, cable driven yes but IIRC they are all winch driven aren’t they? Which is technically a different thing to a capstan that relies upon the friction of the tensioned cable wrapped around the drum to move rather than having the cable attached at a fixed point on the drum to get winched in.
That said I do remember thinking that third one was the work of a slightly and wonderfully deranged genius. And to some extent even if they are winch rather capstan they do largely prove the point it can be done.
Euler’s capstan equation is the fundamental mathematics behind elevator traction calculations.