Most electromagnetic actuators are rotating motors, or some variation on the theme, like servos. However, it’s possible to do linear actuation with electomagnetics, too. [Adrian Perez] demonstrates this with Linette, his design of a linear actuator that he was inspired to build by the structure of our own muscles.
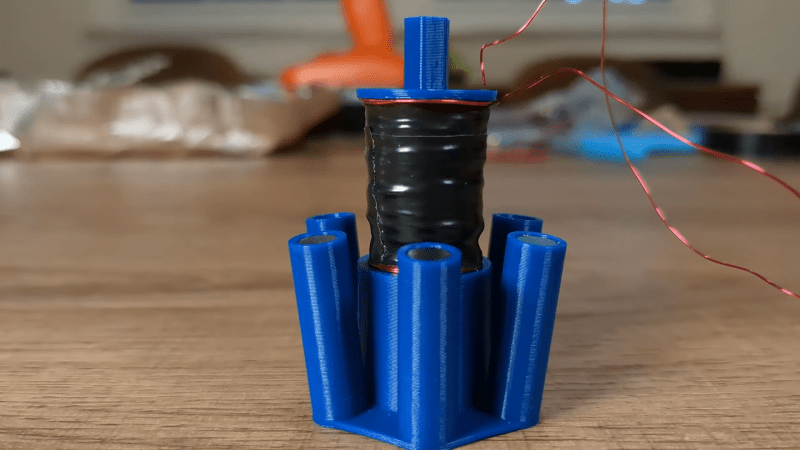
The design uses a coil of copper wire in a 3D-printed plastic housing, surrounded by a claw full of strong magnets. When the coil is activated, the magnets are pulled towards the coil. When the coil is not energized, the magnets fall away. [Adrian] demonstrates the actuator under the control of an Arduino, which switches power to the coil to move it up and down.
He also notes that the design is similar solenoids and voice coil style actuators, though unlike most his uses discrete magnets rather than a single monolithic magnet. It’s possible to get more capacity out of the Linette design through stacking. You can parallelize the actuators to get more pulling force, with neighboring coils sharing the same magnets. Alternatively, you can stack them in series to get longer stroke lengths.
[Adrian] hasn’t put the design to a practical application yet, but we could see multiple uses for robotics or small machines. We’ve seen some other neat DIY magnetic actuators before, too. Video after the break.














“… linear actuator that he was inspired to build by the structure of our own muscles.”
If it was truly inspired by muscles, it would be much more like a linear stepper motor than the solenoid it is.
The video even shows how the molecular stepper motor works, 37 seconds in…
I’m a little mystified that the circuit draws 140 mA when it’s not energized (so, just the arduino and maybe the driver quiescent power), and only 200 mA when it is. The wire gauge used looks like it would draw a whole lot more current than that.
The LEDs on the Arduino are insanely power-hungry! I built a low power device and needed to remove the LEDs from the PCB so that I could lower the current.
Well, that video was five minutes and thirteen seconds shaved right off the bottom of my lifespan.
I’m not sure why I kept watching it, it kept getting more and more pointless.
In what way is this not just an inefficient solenoid?
In a “we switched magnets and coils around way”. It would be better if he used more magnets and put it more closely to coil. Also, it’s not required to angle those magnets. I’ve made something similar, but sadly didn’t finish it. https://hackaday.io/project/19547-electromagnetic-linear-servo It had a lot more force. If it used some steel pipe around coil it would have even more force, could be stacked and parallelized too.
That was my first thought, as well. Also, the shushing of the Roomba was extremely cringe.
When not just looking for linear actuators, permanent magnet linear generator R&D for hybrid EVs has been rather interesting in recent years. Many of the design considerations also apply to linear actuators, only the dimensions and power level are greater.
“Toyota Central R&D developing free-piston engine linear generator; envisioning multi-FPEG units for electric drive vehicles” (2014)
https://www.greencarcongress.com/2014/04/20140422-fpeg.html
X. Wang et al., “A Review of the Design and Control of Free-Piston Linear Generator” (2018)
https://www.researchgate.net/publication/327127242_A_Review_of_the_Design_and_Control_of_Free-Piston_Linear_Generator
I’m very interested in free-piston engines, but none of the literature I’ve seen has even the slightest mention of how to start one. Without a crank to force the initial compression stroke, how does it get started? I can think of solutions, but not even the diagrams I’ve seen lend any help in figuring out what the best method would be.
AN inverted solenoid
I need to understand( without the crazy flux and atmosphere equations plz) how to differentiate the animated world(bpy&bulletge) from musculature in the real world ( which I believe can pull/constrict the same fiber in the center as well as the fore and throu) I would love to see the code replicating your armature in a vr world.