One of the most basic problems with robotic arms and similar systems is keeping the weight down, as more weight requires a more rigid frame and stronger actuators. Cable-driven systems are a classic solution, and a team of researchers from MIT and Zhejiang University recently shared some techniques for designing fully 3D printed cable-driven mechanisms.
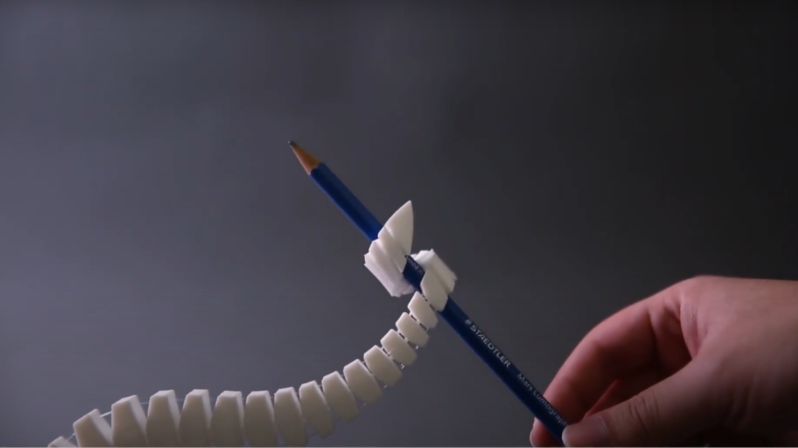
The researchers developed a set of four primitive motion components: a bending component, a coil, screw-like, and a compressive component. These components can work together in series or parallel to make much more complicated structures. To demonstrate, the researchers designed a gripping tentacle, a bird’s claw, and a lizard-like walking robot, but much more complicated structures are certainly possible. Additionally, since the cable itself is printed, it can have extra features, such as a one-way ratcheting mechanism or bumps for haptic feedback.
These printed cables are the most novel aspect of the project, and required significant fine-tuning to work properly. To have an advantage over manually-assembled cable-driven systems, they needed to be print-in-place. This required special printer settings to avoid delamination between layers of the cable, cables sticking to other components, or cables getting stuck in the mechanism’s joints. After some experiments, the researchers found that nylon filament gives the best balance between cable strength and flexibility, while not adhering tightly to the PLA structure.
We’ve seen cable-driven systems here a few times before. If you’re interested in a deeper dive, we’ve covered that too.
Thanks to [Madeinoz67] for the tip!














This is amazing, and I can immediately think of all sorts of applications for it.
I am quite confused by four mechanisms, though. Specifically, I am confused that the “Compress Primitive” rotates when actuated while the “Twist Primitive” is only linear motion.
I think it’s just an error in the caption in their video.
Anyway this is really amazingly cool, and I love the rather cute demos.
There are a lot of instances where the (clearly automated) captioning misinterprets the speaker’s accent, which can be pretty distracting if you are paying attention to the text. “Love” should be “lifelike”, etc.
The examples and engineering good, but it’s clear they assumed using a generative text for their presentation didn’t need an editor. It comes across like a press release, not a video about the latest paper in ongoing research.
It seems like that’s just a problem with the video. The actual paper is describing the primitives more in line with what you are expecting:
4.3 Screw
“The Screw Primitive is structured as a spring that screws around the z-axis while simultaneously shortening its length during actuation. As illustrated in Fig. 6, when the screw primitive is driven, it coincides the behavior of a spring that contracts in length when rotated around its own longitudinal axis.”
4.4 Compress
“The compressive structure incorporates a cable into a linear track structure. We use a basic Prismatic pair with one degree of freedom, allowing only sliding motion along the z-axis. By pulling the cable, two links compress along the linear track, reducing its length by Δ = 0.5L, effectively halving its original size.”
The twist primitive utilizes angular geometry that directs the coiling behavior, while the screw primitive (compression) uses angular cable threading to force rotation, which simultaneously compresses. All of this is visible in the video, I haven’t looked at the paper yet.
Thanks so much for liking the project — and you’re absolutely right, I totally mixed them up. Appreciate the sharp eye and the heads-up!
This guy should build one of those rotary actuators for tendons you featured recently.
Ok. I’ll just say it. I can’t wait to see what this does for the sex toy market.
Is there any info on where\when this will be available?
Ok , someone must to say it so we can move on: tentacles.