As the saying goes — when life gives you lemons, you make lemonade. When life gives you a two-ton surplus industrial robot arm, if you’re [Brian Brocken], you apparently make a massive 3D printer.
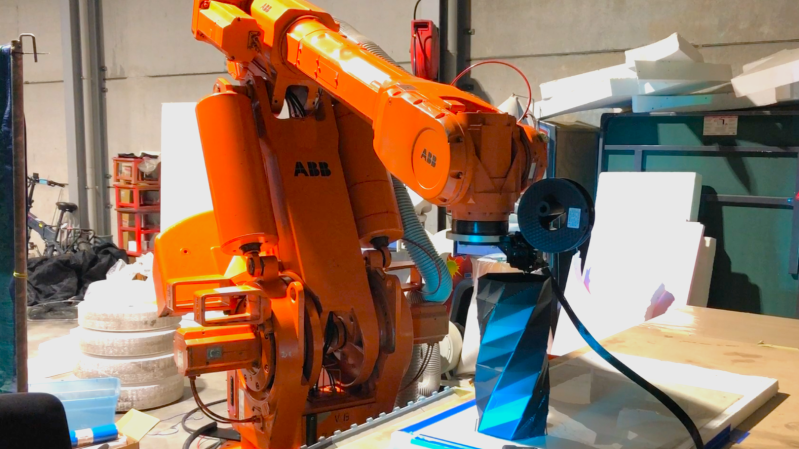
The arm in question is an ABB IRB6400, a serious machine that can sling 100 to 200 kilograms depending on configuration. Compared to that, the beefiest 3D printhead is effectively weightless, and the Creality Sprite unit he’s using isn’t all that beefy. Getting the new hardware attached uses (ironically) a 3D printed mount, which is an easy enough hack. The hard work, as you might imagine, is in software.
As it turns out, there’s no profile in Klipper for this bad boy. It’s 26-year-old controller doesn’t even speak G-code, requiring [Brian] to feed the arm controller the “ABB RAPID” dialect it expects line-by-line, while simultaneously feeding G-code to the RAMPS board controlling the extruder. If you happen to have the same arm, he’s selling the software that does this. Getting that synchronized reliably was the biggest challenge [Brian] faced. Unfortunately that means things are slowed down compared to what the arm would otherwise be able to do, with a lot of stop-and-start on complex models, which compromises print quality. Check the build page above for more pictures, or the video embedded below.
[Brian] hopes to fix that by making better use of the ABB arm’s controller, since it does have enough memory for a small buffer, if not a full print. Still, even if it’s rough right now, it does print, which is not something the engineers at ABB probably ever planned for back before Y2K. [Brian]’s last use of the arm, carving a DeLorean out of styrofoam, might be closer to the original design brief.
Usually we see people using 3D printers to build robot arms, so this is a nice inversion, though not the first.













Nice work. I’ve always wondered what I should do with my surplus of two ton industrial robots.
Been there, done that, with cement and sand support material.
https://vimeo.com/258691871?fl=pl&fe=sh
Ok, but why?
Why not?
because it must be an enery drama to move all that steel for hours…
Why not?
Also if you can get the software nailed down being able to reach as far as one these things can while carrying something a bit more capable extruder wise – perhaps a pellet extruder (or 4) you could really do quite a lot of cool things including non-planar printing, multi material, and printing directly on objects (though you’d likely need to also turn it into a point cloud mapping arm or at least fit a probe to align with the 3d scanners pointcloud to get the right fine tuned positioning). But you do have to start somewhere, and a relatively simple extruder addon is a good start.
I’d be more interested myself in just how much side loading it can take for more real machining – used as a CNC on foam is one thing, but if it can really take more than that (which it probably can) given its huge articulation and reach you could get an impressive array of tools mounted out the way on a wall tool changer and actually print/mill/laser/pick’n’place all in one across pretty huge sweep.
Other than the insane weight and expense of an arm like this (which is why so many things are done with core-xy etc systems – light and cheap) the flexibility it offers from a very small footprint is just so impressive.
Probably can handle quite a bit of side loading since they are used to handle parts and welders and some pretty heavy stuff. Rigidity is the drives while moving would be the toughest nut to crack for machining but those servos are probably pretty torquey. Harmonics would be difficult to figure out for any given position.
He can do it, and it’s there
Your name is “sweethack” and you’re reading this on “Hackaday” and you ask why? That doesn’t even make sense. 🙄
Oh, look I snatched a mighty fine Robot, but what to do with it? Nothing overly useful in the ordinary household I imagine, but at least it can double as a 3D printer. I guess that’s why.
Or welding, or part loading, or assembly work, or almost anything that requires putting something a part or tool somewhere.
For those edge cases where you need an extremely large print volume and money is no object
Another cool thing is the same arm can hold most other motorized tools, i.e. routing spindles, welders, plasma cutters, adhesive dispensers, etc. potentially you could save alot of money by having one motion platform handling several additive or subtractive processes. Some available 3D printers can do this but probably not with the work envelope or rigidity of this industrial robot. Software as usual is the challenge. Another intriguing possibility is 3D print that is not based on horizontal slicing with would potentialy be much stronger.
Just daydreaming about the synchronization problem, i can’t imagine that it’s unique. Surely there’s a way to get the arm’s controller board to send out a separate synchronized data stream for the end effector?
Our hackerspace has an old CRS F3 arm, and my eventual plan is to reverse engineer the protocol it talks to its servos and replace the proprietary controller with LinuxCNC. That would solve both g-code and sync.
But for now I’ve had a lack of purpose, I’m not sure it would be particularly useful as a printer.
For sure this can be done because industrial robots have to do this all the time. When you are moving multiple axis you have to decide whether you need to track a certain path or just move each axis as fast as possible to a target number ( i.e. travel move, working move, or a hybrid like travel with collision avoidance). This is done for lots of robotic processes but this is most similar to welding where they must maintain a speed along a path while controlling filler feed and welding current. There are ways to report current position as well as M codes to trigger external comtrollers (like extruders, welders, end effectors, etc.). To me the biggest challenge will be the CAM process and lack of prebuilt post-processors. Not terrible for designing a production run of a single part but difficult to ad hoc process a bunch of random 3D models.
Given the mass-slinging capabilities of that robot – and if I had the chops, which I don’t – I might have been tempted to take a different approach.
I think I’d take an entire 3D printer, remove the bed, and make mods as required for the print-head to contact its new multiple-square-metre print bed. Then I’d use the robot to sling the modified printer around. For any given area you’d get good fine control, and might still be able to use Klipper.
I’d repurpose the servos and harmonic drives for a telescope mount or two but that’s just me
You would dismantle the arm? That would be stupid, and an incredible waste.
Besides, you could attach a telescope to the end and have the arm do the tracking for you.
Well, I suppose your surplus hardware can be repurposed any way one likes. If what you are into is telescopes or you need the drives for another project, so be it. To me the biggest challenge would be the somewhat inaccessible old controller so my first move might be to try to get to a more modern, more open controller for the arm.
Also “It’s 26-year-old controller” should be “Its 26-year-old controller”
I would like to see it running with a big pellet extruder. The slow print speed wouldn’t be as much of an issue if it was using a 5 mm nozzle.
I hope he is using the money to buy a pellet extruder with 5-10mm nozzles because this is like using the cannon of a tank to swat fruit flies…..
“Let’s build a real bench yacht!”