Part of the charm of quadcopters is the challenge that building and flying them presents. In need of complex sensors and computational power to just get off the ground and under tremendous stresses thanks to their massively powerful motors, they often seem only barely controlled in flight. Despite these challenges, quadcopter flight has been reduced to practice in many ways, leaving hobbyists in search of another challenge.
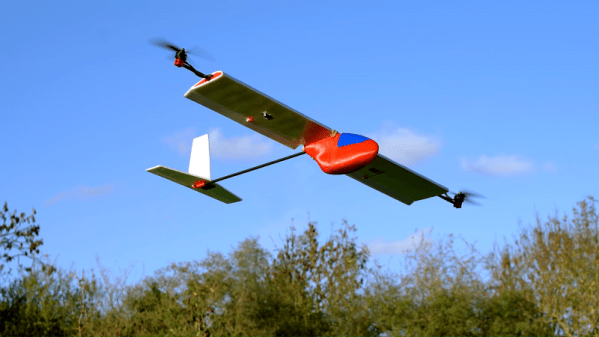
[Tom Stanton] is scratching his creative itch with this radio-controlled tilt-rotor airplane that presents some unique problems and opportunities. Tilt-rotor planes are, as the name implies, able to swivel their propellors and transition them from providing forward thrust to providing verticle lift. With the rotors providing lift, the aircraft is able to hover and perform vertical take-off and landing (VTOL); switched to thrust mode, wings provide the lift for horizontal flight.
[Tom]’s realization of this design seems simple – a spar running through the wing holding BLDC motors and props is swiveled through 90° by a servo to transition the aircraft. Standard control surfaces on the wings and tail take care of horizontal flight. Actually getting an off-the-shelf flight controller to deal with the transitions was tricky. [Tom] ended up adding an Arduino to intercept the PWM signals the flight controller normally sends directly to the servos and speed controls to provide the coordination needed for a smooth transition. Full details in the video below, and some test flights which show that an RC VTOL is anything but a beginner’s plane.
[Tom] is proving himself to be quite the Renaissance man these days. Between air-powered piston engines, over-balance trebuchets, and popping the perfect wheelie, he seems to have covered all the bases and done his best to keep our tip line stocked.
Continue reading “Tilt-Rotor Plane Needs Flight Controller Hack To Get Airborne”









