The worst thing about a volume knob is that, having connected it to a computer, it might be wrong: if you’ve manually altered the volume settings somewhere else, the knob’s reading won’t be correct. [I Got Distracted] has a quick tutorial on YouTube showing how to use a BLDC, a hall effect sensor, Pi Pico and the SimpleFOC library to make a knob with active haptic feedback and positioning.
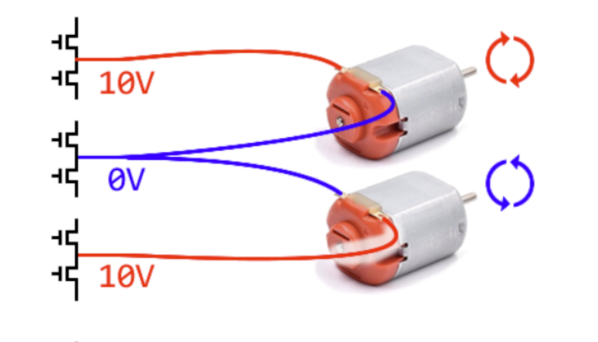
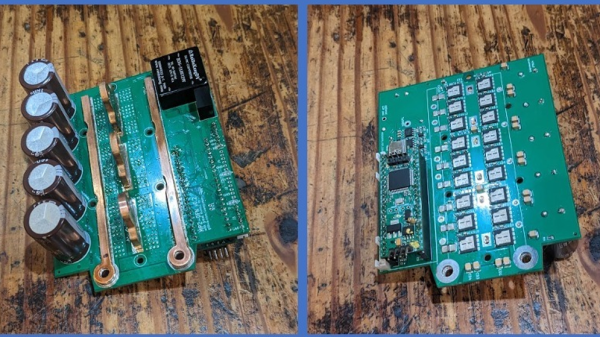
We covered the SimpleFOC library a few years ago, but in case you missed it, it’s, well, a simple library for FOC on all of our favorite microcontrollers, from Arduino to ESP to Pico. FOC stands for field-oriented control, which is a particular way of providing smooth, precise control to BLDCs. (That’s a BrushLess DC motor, if the slightly-odd acronym is new to you.) [I Got Distracted] explains exactly how that works, and shows us just how simple the SimpleFOC project is to use in this video. Why, they even produce their own motor controllers, for a fully-integrated experience. (You aren’t restricted to that hardware, but it certainly does make things easy.)
The haptic feedback and self-dialing knob make for an easy introductory project, but seeing how quick it hacks together, you can doubtless think of other possibilities. The SimpleFOC controller used in this video is limited to relatively small motors, but if you want to drive hundreds of kilowatts through open source hardware, we’ve covered that, too.
Arguably, using a motor as a knob isn’t within the design spec, and so could almost qualify for our ongoing Component Abuse Challenge, had [I Got Distracted] thought to enter.
Continue reading “Motors Make The Best Knobs With SimpleFOC”