Modern radio-controlled multi-rotor drone can be incredibly agile, but can only make orientation changes around the yaw axis while remaining in approximately the same position. Researchers at ETH Zurich have again built and tested multirotor with controllable motion six degrees of freedom, this time dramatically improving efficiency.
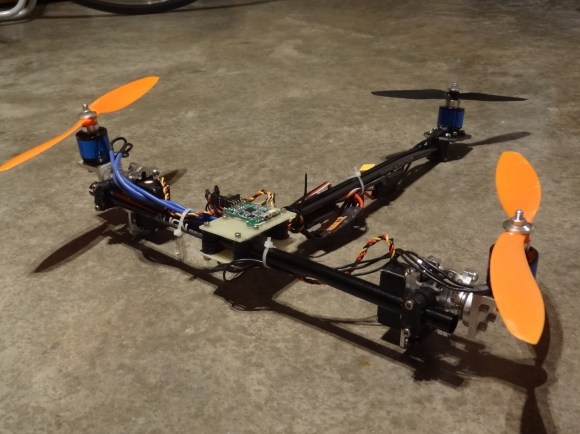
We covered a similar design from ETH Zurich previously which was hexacopter with arms with limited rotation. This new design is also a hexacopter, but with 2 coaxial motors on each rotating arm. Each arm has an increased range of rotation over the previous design, beyond 360 degrees. With the range of rotation and the very complex control system, the drone can efficiently fly in any orientation, while still being able to apply effective torque or linear force in any direction. This opens up a lot of possibilities for tasks that drones can perform, like close-up industrial inspection, using tools or pulling cables while keeping the rotors clear.
The arms do have a limited amount of rotation before winding the motor cable tight, but the control system keeps track of this and can unwind during or after movement. See the video after the break to see it in action. The complete scientific paper is not light reading, but definitely interesting. We’re looking forward to seeing if and when these type designs get used in real-world applications.
There are without a doubt a lot of drones in our future, and probably the most successful project to date is the Zipline fixed-wing drones in Rwanda and Ghana, which have made over 35000 deliveries of emergency medical supplies since 2016.
Thanks [Qes] for the tip!