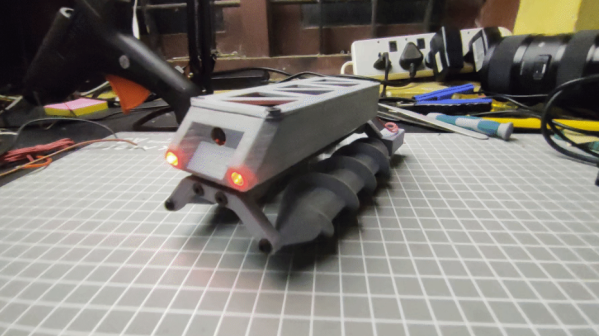
Wheels and tracks are common choices for robot propulsion, but they’re not the only game in town. You can do some nifty things with long extruded screws , and they work pretty well in soft terrain. [gokux] set about building a small robot using this propulsion method using 3D printed parts.
The build uses a Seeed Studio XIAO ESP32S3 as the brains of the operation. This provides wireless connectivity for remote control, as well as a way to get a low-latency video feed out of the robot from the OV2640 camera. The ESP32 controls a pair of brushed DC gearmotors via a DRV8833 motor driver. Each drives one of the two screws on the robot. By driving the two screws separately, the robot has simple skid steering. Two 18650 lithium-ion cells provide power for the robot, and are charged via a TP4056 battery charger module.
If you want to build a small robot that can handle soft terrain well, screw drives could be just the solution you’re looking for. They’re usually a bit slow, though, especially for human-scale conveyances, so don’t write off wheels or tracks if you don’t have to. And, of course, when your build is done, don’t forget to put it online and tell us all about it!










