3D printing makes it easy to produce complex geometries, but the fused deposition methods generally create parts with poor surface finish, largely due to the layers being highly visible in the finished part. There are a wide variety of ways to deal with this, often involving sanding parts after production, or the use of fillers and paints. [XerotoLabs] has another solution. (YouTube, video below the break.)
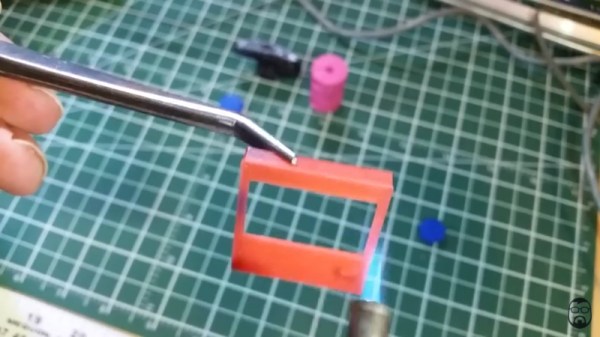
To smooth the parts, a butane torch is pressed into service. The flame temperature is kept fairly low, and the torch is used almost like a brush to evenly apply heat to the surface of the part. As the PLA reaches its melting temperature, surface tension helps to smooth the part out. This is very similar to flame polishing which is commonly used in the fabrication of acrylic plastics.
It is a technique that requires some finesse – too much heat or focus on a single area, and you’re liable to end up with a molten plastic blob instead of a nice shiny finished part. Precautions must also be taken to avoid burning yourself or your workshop to the ground. But it’s a useful tool to have in your kit when you’re producing PLA parts that you want to look their best.
We’ve seen other techniques for smoothing PLA, too – the solvent method is particularly interesting. Continue reading “Smooth PLA Through The Fire And Flames”










