Most of the robotics projects we see around here are heavy, metallic machines that move with exacting precision with steppers, servos, motors, and electronics. [Matthew] is another breed of roboticist, and created a quadruped robot with no hard moving parts.
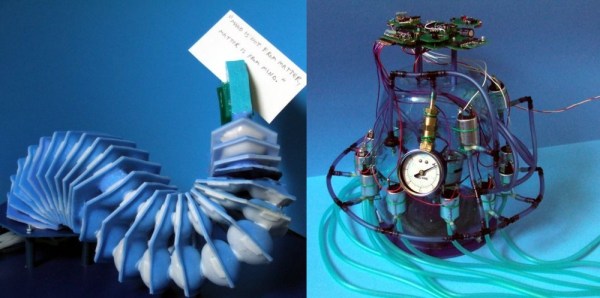
[Matthew] calls his creation the Glaucus, after the blue sea slug Glaucus atlanticus. Inside this silicone rubber blob are a series of voids, allowing compressed air to expand the legs, gently inching Glaucus across a table under manual or automatic control.
Even though no one seems to do it, making a few molds for casting on a 3D printer is actually pretty easy. [Matthew] is taking this technique to an extreme, though: First, a mold for the interior pressure bladders are printed, then a positive of this print made in silicone rubber. These silicone molds – four of them, for the left, right, top and bottom – are then filled with wax, and the wax parts reassembled inside the final ‘body’ mold. It’s an amazing amount of work to make just one of these soft robots, but once the molds and masters are made, [Matthew] can pop out a soft robot every few hours or so.
There’s a lot more info on Glaucus over on the official site for the build, and a somewhat simpler ‘compressed air and silicone rubber’ tentacle [Matthew] built showing off the mechanics. Video below.
Continue reading “Soft Robotics, Silicone Rubber, And Amazing Castings” →